
6 月 3 日,腾讯轮腿式机器人 Ollie(奥利)在机器人行业顶会 ICRA 正式亮相。它像一个灵活的“轮滑小子”,能完成跳跃、360 度空翻等高难度动作。
轮腿式机器人(wheel-legged robot)是近年来机器人研究的前沿领域。Ollie 兼具轮式结构和腿部能力,轮式结构移动快、效率高;腿部能力让 Ollie 适应不平地面、完成跳跃台阶等动作,达到了行业领先水平。
这是腾讯 Robotics X 实验室的新型机器人。在自平衡自行车、机器狗 Jamoca 和 Max 之后,Ollie 积累了实验室的移动控制技术,并在运动规划、平衡与稳定性上重点突破,成为实验室又一大创新成果。
在日前举办的 ICRA 2021,腾讯 AI Lab 及 Robotics X 实验室主任张正友博士受邀作大会报告,介绍了 Robotics X 实验室在机器人移动研究领域的布局与进展,并分享了 Ollie 的技术细节。
“轮滑小子”首次亮相,跳跃、空翻样样在行
要让机器人应对复杂地形,跳跃能力不可或缺。Ollie 最低身高只有 35 厘米的 Ollie,可以跳上 40 厘米的台阶,竖直起跳高度最高可达 60 厘米,能轻松完成 360 度空翻挑战;在平地上时,Ollie 更像是一个“不倒翁”,能抗住各种“突发”状况。
它单腿采用并联机构,与身体形成五连杆结构,使整体具有结构简单、动态性能高、爆发力强的特点;“尾巴”的独特设计一方面为 Ollie 提供额外角动量,助其完成更高动态运动,如空翻。同时“尾巴”可充当第三条腿,增加稳定性,为搭载机械臂完成更多任务提供可能。
应对复杂地形,完成高动态空翻动作背后,源于腾讯 Robotics X 实验室的最新研究进展:非线性控制技术、全身动力学控制和轨迹规划。
非线性控制技术让机器人具备良好的平衡能力,此前实验室研发的自平衡自行车已应用同类技术,在静止及行进状态下均保持平衡不倒。
针对轮腿式机器人的形态和特点,腾讯 Robotics X 实验室研发团队适应性地应用非线性控制方法,控制器不再受限于模型的可线性化区间内,使机器人 Ollie 在大角度倾斜时也具有良好的平衡能力和鲁棒性(Robust 音译,指在异常和危险情况下系统生存的能力)。
在双轮模式下,机器人与地面只有两个接触点,对平衡能力要求更高。在变换身高过不平整地面、甚至单腿过障碍时,Ollie 都能完美保持平衡。
全身动力学控制像给 Ollie 装上了发达的“小脑”,其采用最优化方法求得各关节力矩来实现全身姿态调整,不仅能让它实现更有挑战的运动,并在面对突如其来的巨大冲击如在空翻落地和遇到碰撞时,Ollie 能“以柔克刚”,顺利抵抗外界干扰,保持平衡。
除了平衡能力之外,Ollie 还拥有轨迹规划能力。在完成这些动作时,Ollie 要动用自己的“大脑”提前“想好”运动轨迹,即如何应用自身的形态和结构特点,最大程度地发挥关节电机性能来实现目标运动。
Ollie 以全身动力学模型为基础,将整个跳跃或空翻过程分解为起跳、飞行、落地三个阶段,通过优化手段得到完成整个运动的关节电机位置、速度和关节力矩的参考值序列。
Robotics X 移动能力再突破 论文入选机器人顶会 ICRA
腾讯 Robotics X 实验室主攻移动、灵巧操作和智能体三大机器人核心通用技术的研究与应用。其中,移动能力被认为是机器人最核心、也是最基本的能力之一。
实验室移动技术框架包含机械设计、感知、运动规划及控制,以及融合这三者的整机系统设计与搭建等四大模块,他们分别可理解为机器人的躯干、眼睛、大脑,以及各“器官”协调的能力。
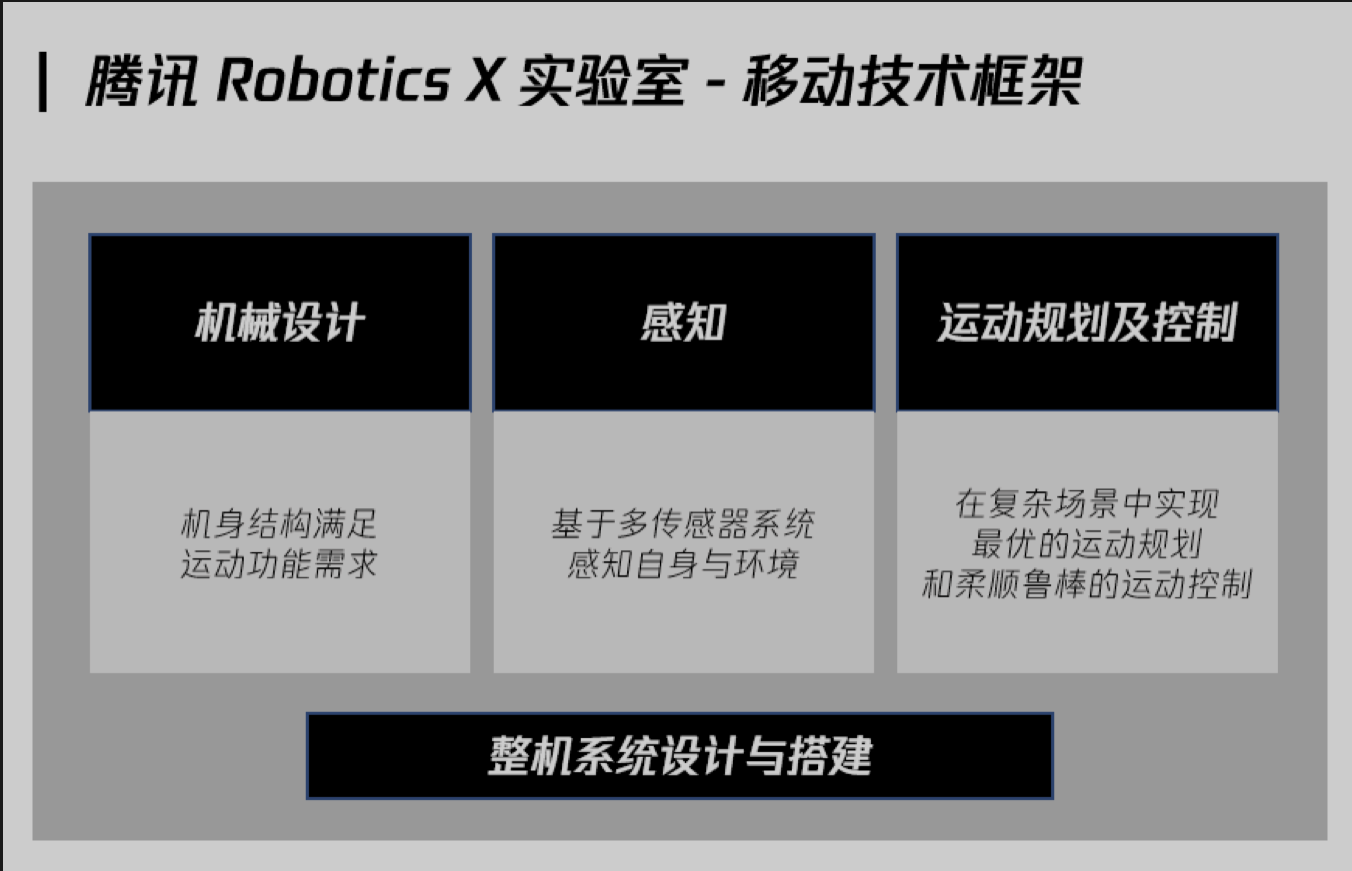
Ollie 的“轮滑”、“空翻”能力就来源于这些器官协调后的结果。在机械设计、整机系统与控制软件上集成迭代了实验室技术积累,并重点在运动规划与控制上突破创新。新增的全身动力学控制与整机参数辨识提升了机器人运动的精准度、灵活度以及柔顺性,拓展了实验室的移动技术布局。
Ollie 相关研究论文已被 ICRA 2021 收录,论文介绍了轮腿式机器人平衡控制器的设计思路与实验结果。ICRA 全称国际机器人与自动化会议(IEEE International Conference on Robotics and Automation),是机器人领域最有影响力的国际学术会议之一。
目前 Ollie 还处于研发阶段,实验室将基于轮腿式机器人平台的机动性特点,拓展平台上感知、负载等各功能模块搭建,让机器人具备更成熟、更丰富的能力。
比如,本次团队尝试探索了 Ollie 的负载能力,两轮、三轮可以随意切换,再加上一个机械臂,让它能够平稳地端起一杯咖啡,通过轮式移动递给远处的客人。

未来,腾讯 Robotics X 实验室还将在机器人行业做全方位、多领域的探索,向人机共存、共创、共赢的未来不断迈进。




