

导读:自动驾驶中的感知技术如同驾驶员的"眼睛"和"耳朵",在高速重卡的场景中,感知技术将面临哪些挑战?在量产化道路中,如何让感知技术与产品相结合去看清和理解足够的场景,本文将分享我们的一些心得体验。
以下 Enjoy~
大家好,很高兴今天给大家分享智加科技在感知技术上的实践和探索,在前面的环节,江博士已经介绍了很多深度学习在智加自动驾驶中的很多应用,这里我特地给大家多介绍一些感知方面,深度学习(还包括其它的一些传统方法)能够落地的一些方法和实践,尤其是我们在实践过程中遇到的一些技术问题和一些有意思的 case,以及我们量产过程中遇到的一些问题,都会跟大家一起做一些分享,大家也可以留言跟我们讨论。
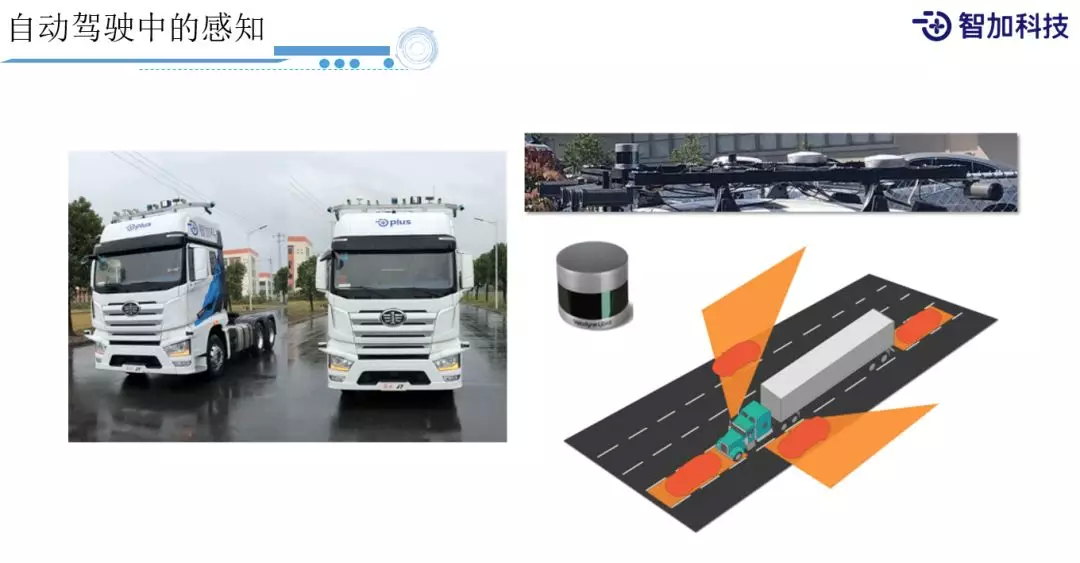
这里,感知的定义就不多介绍了,感知是我们自动驾驶的"眼睛"和"耳朵",是自动驾驶信息获取的第一步,所以感知是非常基础和关键的一个环节。这需要在我们的自动驾驶车辆上布满传感器,这样才能 360°无死角的知道周边的各种情况,而且不止包括我们的"眼睛"Camera,还包括我们的"耳朵"激光雷达和毫米波雷达等非视觉传感器,这些在我们的测试车辆上都是必备的,我们可以从上图中看到,我们的车辆上布满了传感器,车前、车尾、车顶都会存在传感器。
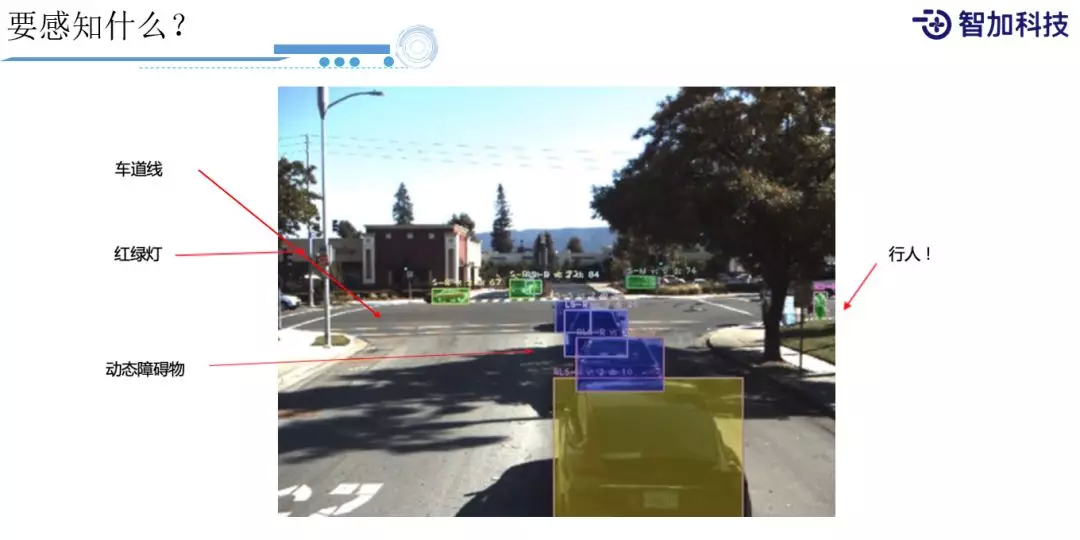
自动驾驶车辆除了能看到东西之外,关键还是需要理解它。只有理解它之后获得的信息,才对我们后续的处理有意义,所以需要识别,那么,对于自动驾驶而言,需要识别什么?显而易见,第一个是车道线,我们知道车道线才能知道怎么开;然后我们还需要知道红绿灯,以及非常重要一点,就是动态障碍物(如前面有什么车辆),这是非常重要的;还有就是行人(对于城区的自动驾驶是非常关键的)。对于智加的重卡自动驾驶中,最重要的还是 车道线 和 动态障碍物,所以这两方面会重点进行介绍。
1. 车道线检测
① 传统方法到深度学习方法
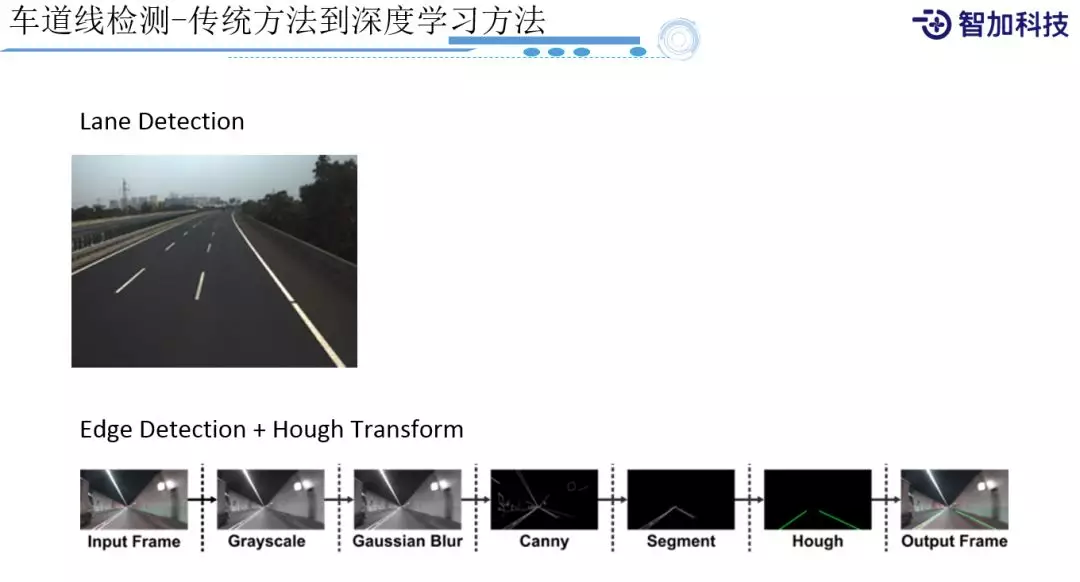
首先是车道线检测。从图像来看,车道线相对而言比较有规律,所以用一些传统的视觉算法就能取得不错的效果,比如对输入的数据做变换之后,做边缘检测(Edge Detection)和霍夫变换(Hough Transform)就能够识别出图像上的这些很像车道线的形状了。其中边缘检测是非常关键的一环,根据像素和像素之间的差值做一个滤波,找到差异点的线段,这就是传统的方法。但是传统方法会遇到瓶颈,因为要处理的场景非常多:
不同的光线;不同的车道线形状;车道线本身不同程度的破损;或者是它的一些噪音,尤其是一些障碍物的遮挡,如大量车辆遮挡的情况下,用传统方法很快就会遇到瓶颈,调参数是调不过来的。
所以,我们采用深度学习的方法来解决。
② 基于深度学习的方法
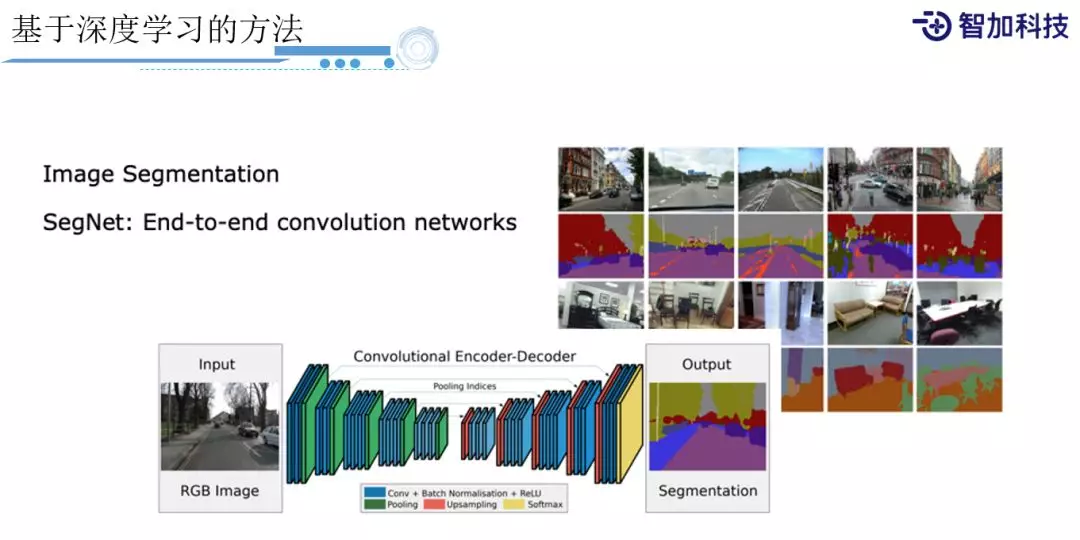
对于深度学习,业界已经有很多成熟的方法。这里很重要的就是图像分割,我们会给图像上每一个 pixel(像素)都去预测它到底是什么样的分类,然后在打标的时候,也会标注图像上到底哪些是车道线,哪些是障碍物,哪些是天空,哪些是树木,等不同类型的标签。我们通过这样一个卷积的网络,类似 Encoder-Decoder 架构,先去做 encoding 到 feature map,然后再 deconvolution 到一个大的 feature map,然后再预测每个 pixel 跟 ground truth 之间分类的 loss,比如用 Softmax 或者 cross entropy 都是可以的,最后我们就能学习出每个 pixel 是什么分类。但是光知道图像的分类可能还不够。
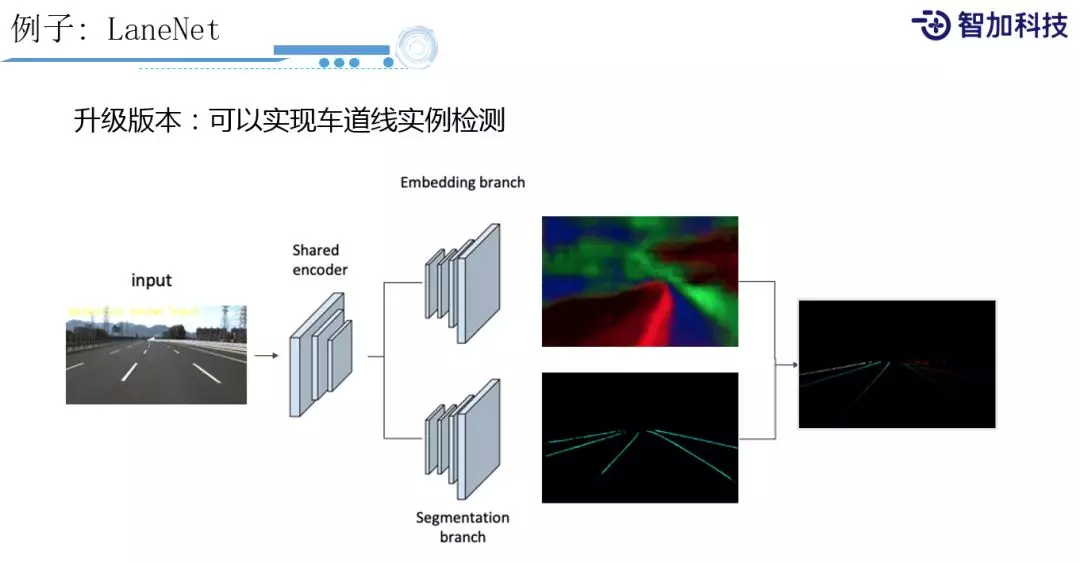
我们还需要进一步知道,到底图像上有几条车道线,哪些车道线是属于一条车道的?这里简单介绍下,我们会按照图中的做法,先把图像做 encoding 之后会分成两个 branch,一个是 Embedding branch,用来生成每个 pixel 的向量,这个向量可以告诉你它跟不同实例距离的分布,另外一个是 Segmentation branch 传统的分类网络。Embedding branch 向量计算出来之后和 ground truth 点的向量之间计算距离,这样就可以知道跟 ground truth 点之间有多近,和非 ground truth 点之间有多远,用这个距离当做 loss,最后再结合分类的 loss,得出最终的结果。
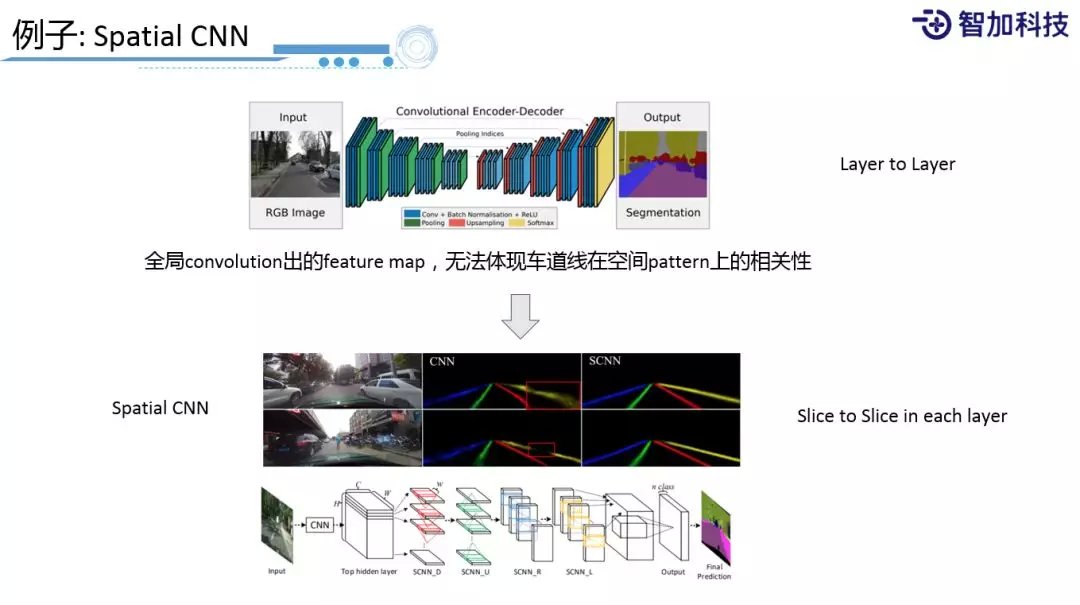
刚刚说的这些方法其实都是基于 convolution 这样传统的方法来去做的,它有一个局限,我们知道 CNN 是对整个图片都去做一次卷积,输出的 feature map 反映的还是整个图片的特性。但是对于车道线而言,它其实是很有规律的,就是近处看到一个车道线,在远处还是同一个车道线,是一个很有复制性的 pattern,所以业界提出了一个很好的方法,叫 Spatial CNN,把整个空间按照一个 sliding window 结合相邻 window 上一次的输出,叠加到新的 sliding window 输入上,相当于在图像上的 RNN,只不过它是在一个单层的图像上来做的。通过这种方法就能学习出空间上的 pattern,得到更好的车道线精度,对于我们来说是非常有用的。
2. 障碍物检测

我们再来看下 Object Detection,对于障碍物而言,它的 pattern 不像车道线那样有规律,而且非常的离散,所以单纯的用分割网络是很难解决的。所以我们还会用到现在业界比较成熟的 Object Detection 的方法。
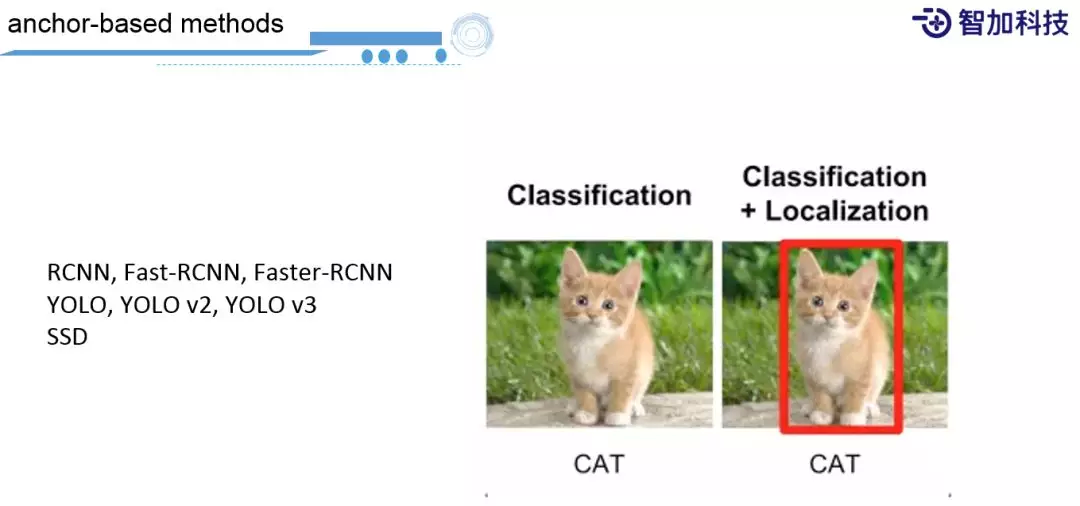
什么是 Object Detection?传统的分类,只需要告诉你这个图片或者 pixel 是什么类型就可以了。对于 Object Detection 还要告诉图片上物体的位置、大小以及位置所对应的框里边的分类,是什么类型的物体。比较成熟的方法有:RCNN,Fast-RCNN,Faster-RCNN,YOLO,YOLO v2,YOLO v3,SSD 等。
① Faster RCNN
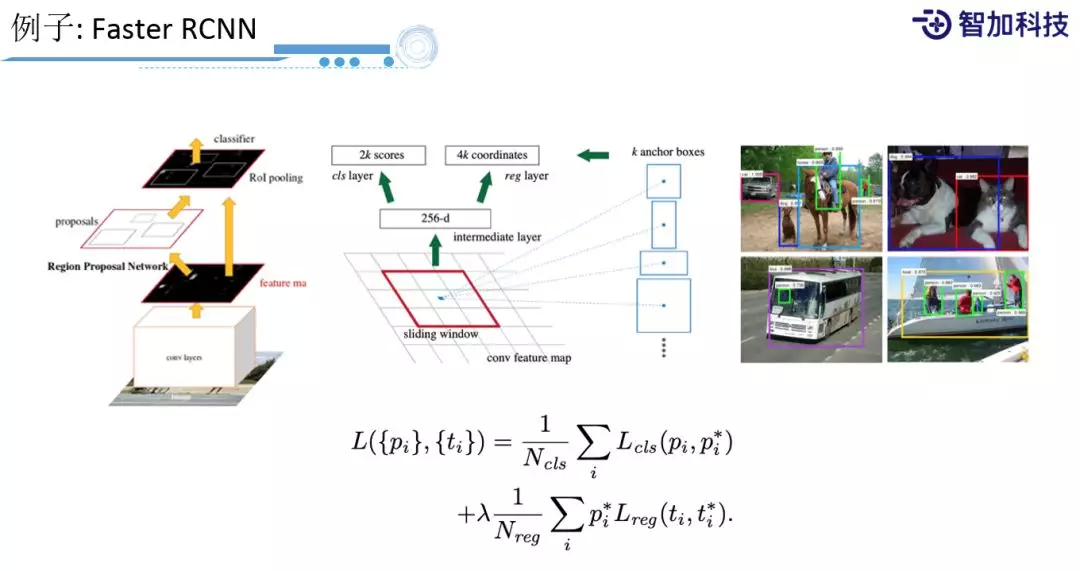
其中 Faster RCNN 是一个非常经典的做法,它是一个两阶段的算法,首先把图像通过卷积网络生成 feature map,在 feature map 基础上预测出 feature map 上都有哪些 region,region 就相当于 bounding box,预测出 bounding box 后, 再通过分类网络预测 bounding box 里面的图像,到底是什么样的类型。然后这两个网络会 share 之前的 convolution network,所以在性能和效果上会达到一个比较好的 tradeoff。同时,这里可以看到 region proposal network 是整个网里最关键的一个环节,它将整个网络划分成若干个 grade,每个 grade 上的点生成固定的 K 个 anchor boxes 的候选,每个 anchor box 预测出它跟 ground truth 坐标的差距是多少,它是一个 regression network。还有一个 network 是预测出物体到底是前景,还是背景,一个二分类网络。所以将这两个 loss 合并起来,当做整个学习的目标。所以,这也是为什么把这种方法叫做 anchor-based,这里的 anchor 就是指 region box。
② YOLO
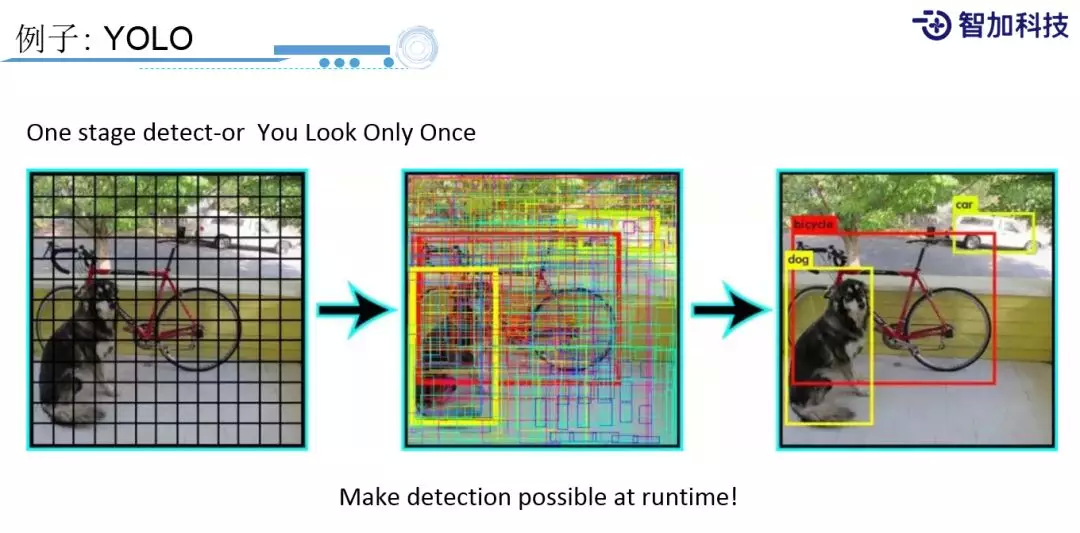
再进一步,业界又提出,可以一步就完成 region 预测和它的分类预测。比如 YOLO,You Look Only Once 这种方法,每个点会候选出若干个 bounding box 和 sliding window,每个 sliding window 还有若干个要预测的分类,一步就能预测出分类和它对应的 region box,让你的性能得到很大的提升。所以,现在很多业界主流都会用这样的方法。
③ 大物体检测
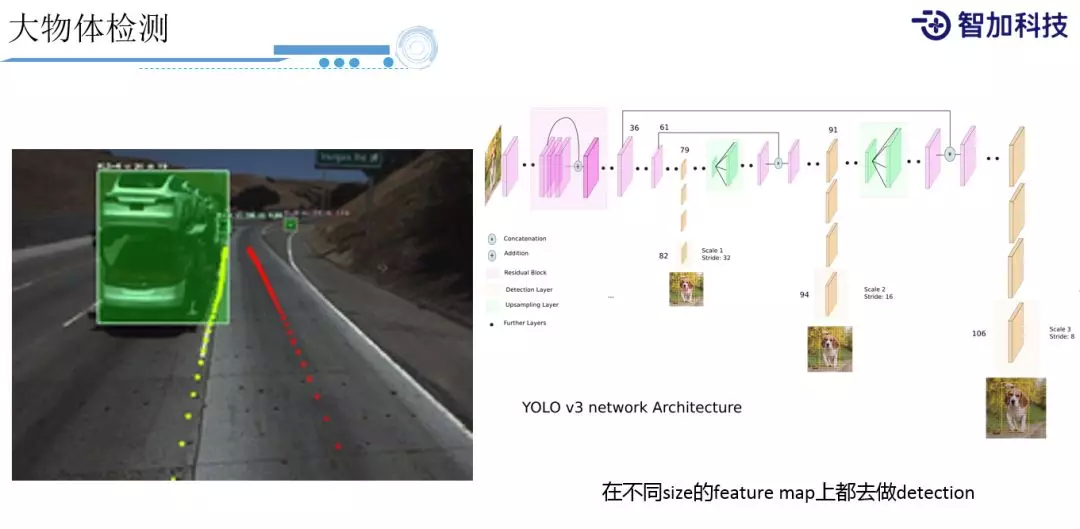
我们可以看下,我们采用这些方法后,实际中遇到的一些很有趣的问题。如左图,大家可以看到这是一个大车,是一个上下两层装载了很多小汽车的货车,从后面看它是两个小车,所以它到底是一个大车还是小车?这对于物体识别来说是一个很具有挑战性的例子,但我们还是能很稳定的识别出来。在这里,我们就借鉴了 YOLO v3 的思想,把 feature map 分成多个 scale(级别),从小到大。将大物体在每个 scale 的 feature map 都进行一次预测,这样大物体在小 scale 上能很好的预测出来。同时,它也兼顾了在大 feature map 上去预测小的分类物体。
④ 小物体检测
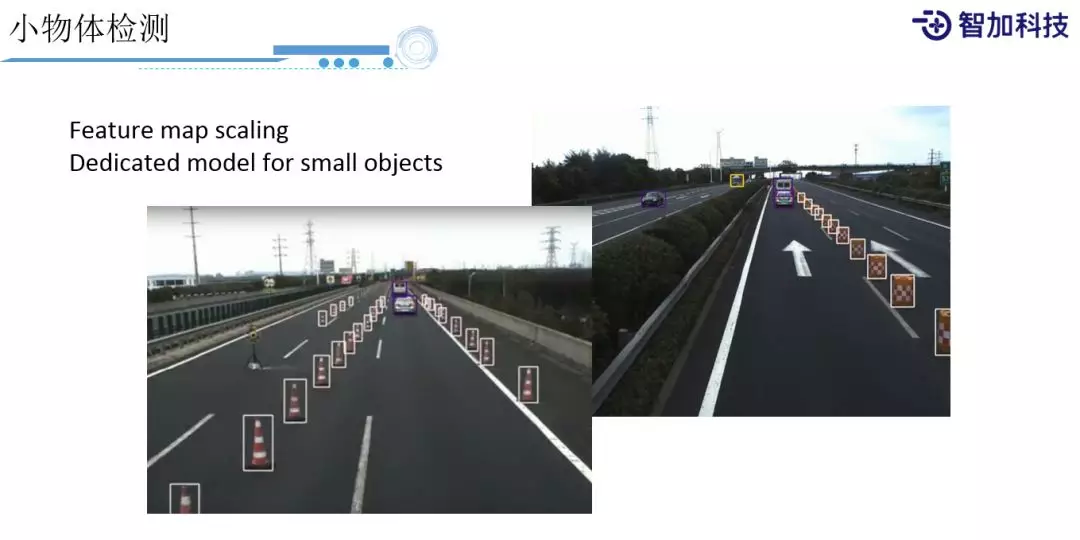
所以我们在这种小分类的物体上也能有比较好的效果。这是我们内部实验的一个效果,可以看到这些锥形筒,大部分都是能识别出来的。但是,由于 YOLO 这种方法分类的个数是固定的,并且 region 也是固定的一个数目,所以在一些小物体上,一些不好分类的类别上,还是很容易出错的,它并不是一个 best search 的方法。所以,有时候我们还会用一些特定的网络来专门识别这种特定的小物体。
⑤ 样本平衡
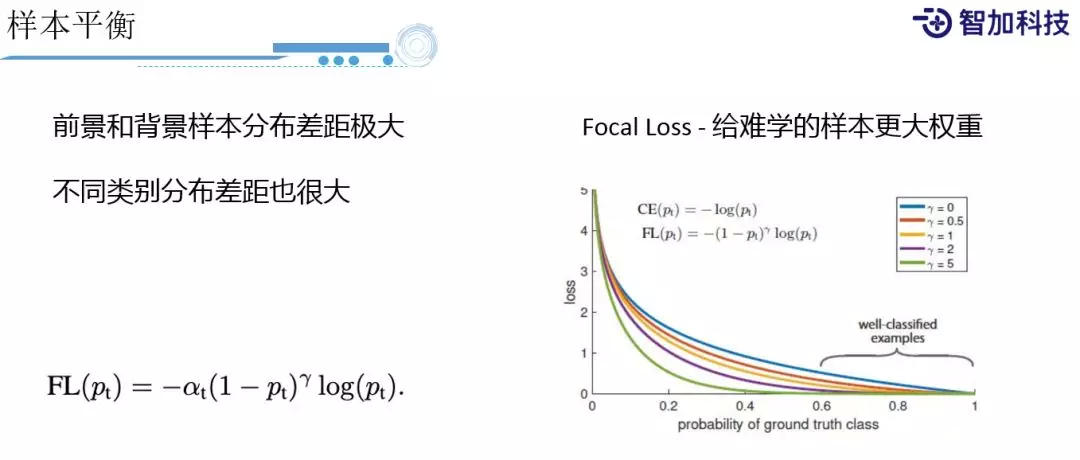
我们还会遇到一个问题,就是样本平衡问题。像刚才 Faster RCNN 里面,我们会遇到前景物体和背景物体样本分布差别很大,以及不同类别差别也很大。因为我们需要知道高速上行驶的到底是大车、小车,还是摩托车,对于不同类型的车,后续的策略可能是不一样的。由于不同类别差别很大,且天然的在样本上差别就很大,所以很难去平衡他它们。业界通常采用的方法,如 Focal Loss 会给这种比较难学的样本,增加它的权重,通过α和γ来控制权重比例。另外我们也可以直接计算不同类别的分布,然后用类别的分布当做一个控制 Loss 的权重。简单来讲,分布比较少的样本权重就会大一点。
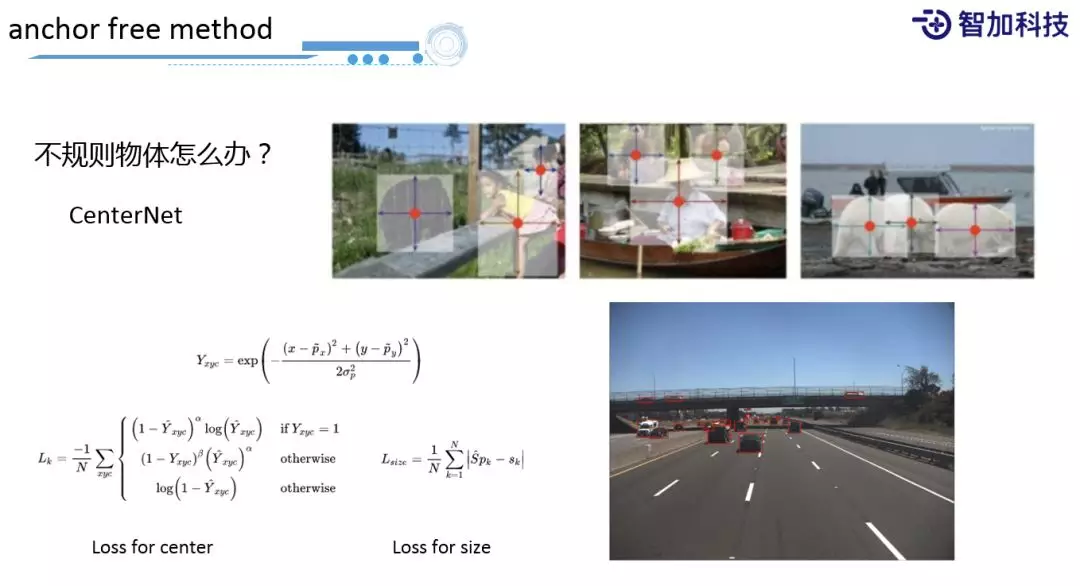
还有一个问题就是遇到这种不规则物体怎么办?比如图片中的小孩,如果用 bounding box,整个 bounding box 之内物体的分布是很不规律的。因此业界提出了 anchor free 的方法,比如 CenterNet,它的想法很简单,只预测每个物体/目标的中心点是什么就可以了。根据中心点和 ground truth 的中心点,计算它们之间的差距/距离。但是,ground truth 中心点会按照高斯分布来分布出一个从中心点特征更明显,到周围比较弱一些的 ground truth 分布,再去跟预测点计算它的 loss。可以看到这个形式其实很像刚才的 Focal Loss,只不过这是一个计算点中心形式的 Loss Function。同时,还会计算回归的大小,看什么样范围内的物体和 ground truth 匹配度更高一些。所以,在上图中,对于不规则物体,如桥上横着的货车,这种长条形状,我们也能够识别的很好。
3. Lidar Detection
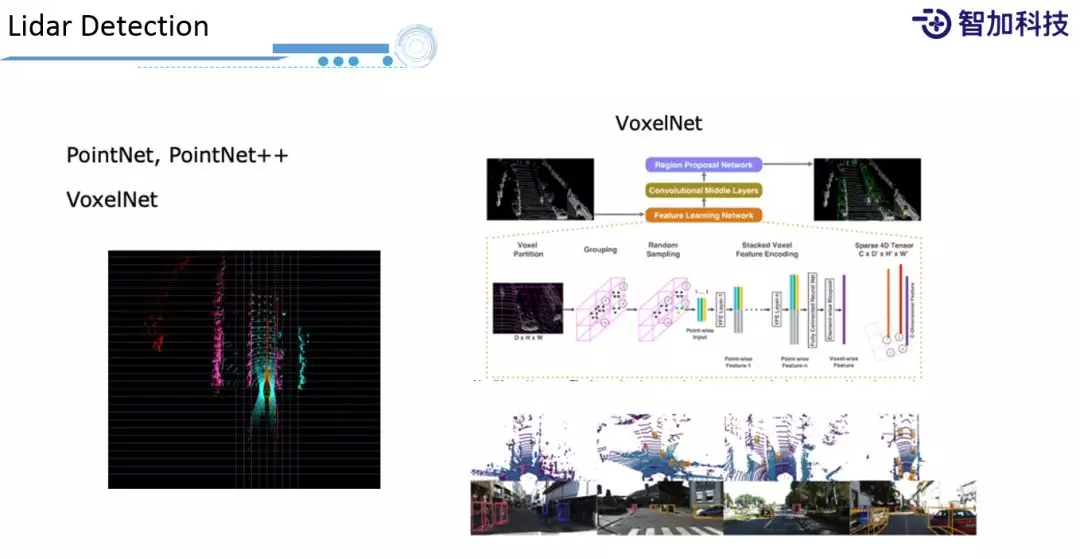
除了自动驾驶的"眼睛"之外,我们在"听觉"方面(如:激光雷达)也有很多的应用。我们会用激光雷达做 Object Detection,对于比较流行的方法,我们都会做尝试,比如:PointNet,PointNet++,VoxelNet 等。尤其是 VoxelNet,它给你的空间做一个 3D 的划分,划分出若干个 Voxel,在这基础上做预测,它在性能和效果上都能达到比较好的折中。
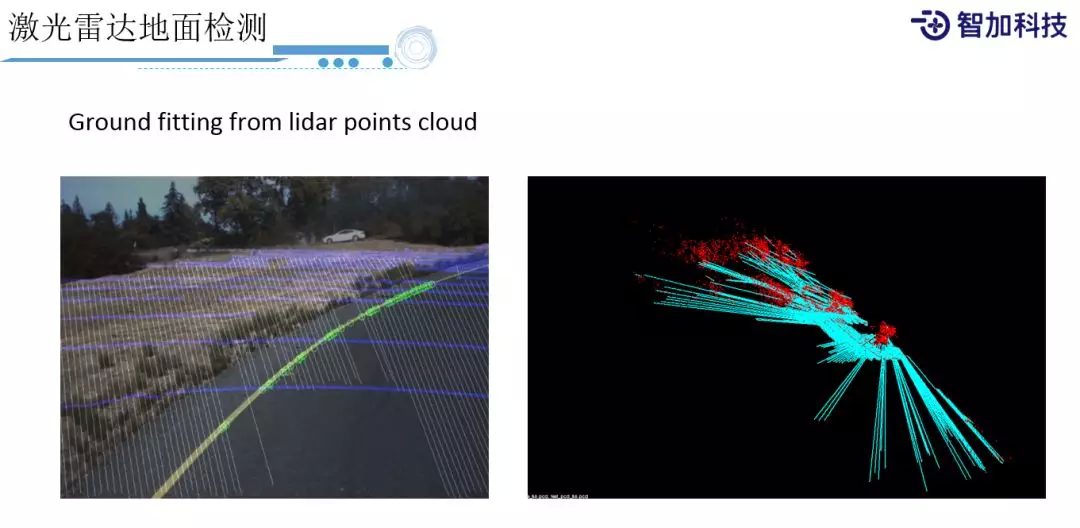
除了物体检测之外,激光雷达还有很重要一点,就是检测地面。因为激光雷达原理是遇到物体就会返回信号,所以信号大部分是地面(ground),当我们拿到地面信号之后就可以(因为它比较有规律)直接用一些传统方法来去做一个 fitting,我们就可以 fitting 出平面,而且不见得是平面,它有可能是个曲面。比如图中这种匝道上的上坡,我们还是比较好的能够 fitting 出这个 ground。地面预测出来之后,我们就能够把它给排除掉,帮助后面的 detection 做更好的处理。反过来,当地面识别出来之后,我们也可以把 Object 去掉,通过 ground 来辅助车道线做一些更好的处理,就能知道车道线的高度和深度是多少。
4. 感知在自动驾驶重卡上的挑战

刚才讲了很多感知技术,在传统自动驾驶上,会用到的一些方法。在我们的重卡自动驾驶中,还会有一些特殊的需求:
车速快。因为我们是在高速路上行驶,所以对我们的检测速度有了更高的要求。
检测距离需要更长。因为车速快,所以需要有更长的时间来防备出现一些危险的情况,这就需要更长的探测距离,保证有足够的时间刹车。
最重要的就是安全第一。这对我们的算法和系统都提了非常高的要求(稳定性、准确性、覆盖率)。

大家可以想像下,我们的机器学习技术可以解决所有问题么?大家可以看到左图是中国的高速,在中国的高速上,我们训练出来的模型,你觉得有可能在美国的高速上直接使用么?这看起来风险还是很大的,对不对?我们可以看到美国的基建跟中国比,还是落后很多的。所以说,这是机器学习的一个痛点,本质上讲它是数据驱动的一个方法,在中国的数据上积累的一些结果,在其它地方直接用还是很难的。所以关键的一点是,我们要学到数据里面的知识,或者它的方法,把这种方法泛化到别的场景上,才能适应各种场景。当然这还需要我们的 AI 技术走很长的路,在这之前,如果 AI 不知道怎样学出这种方法,还是需要我们人来教它这种方法,所以在我们系统的实践过程中,还会用一些人工的经验。
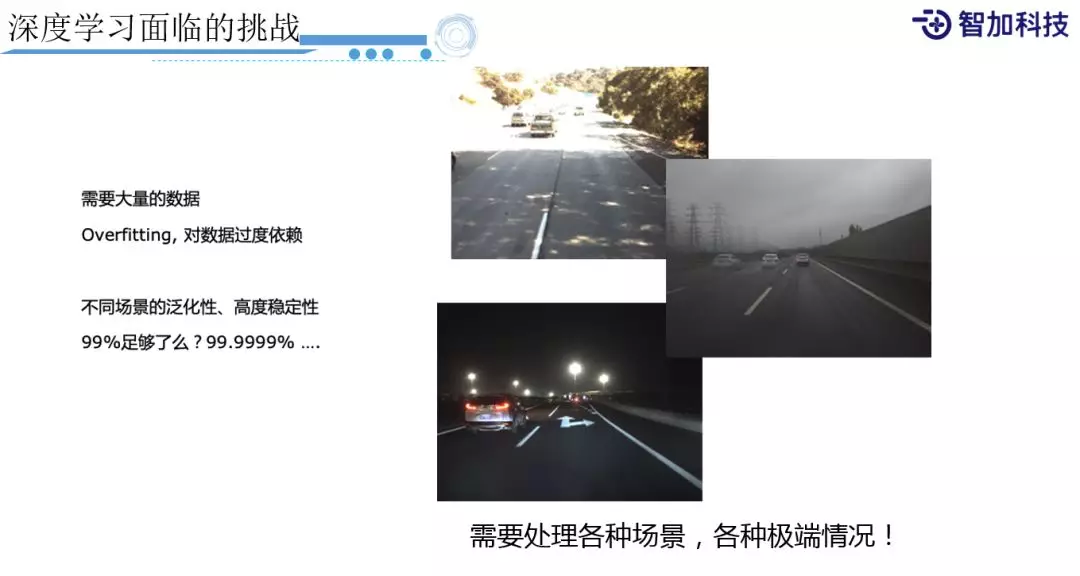
再看一些例子,我们要处理的各种 corner case:像这种阳光非常强烈,曝光的情况,这也是美国那边的情况;然后是苏州这边,雨天的情况;还有在夜间当有强光或者是光线不足的情况,会有很多 corner case。只依赖深度学习,还是很难解决这些长尾问题。
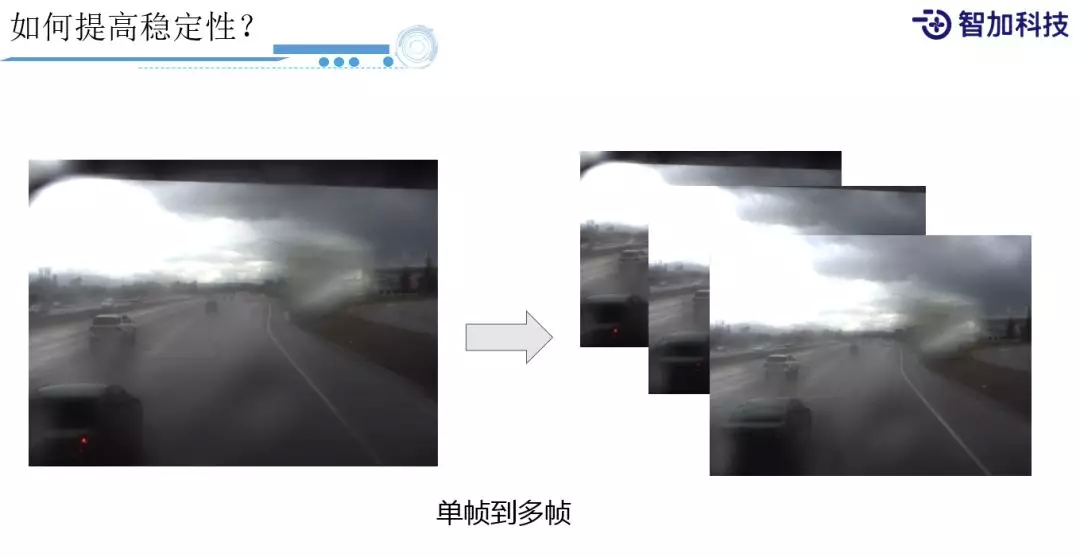
所以,怎么改进稳定性问题?这里有很多环节需要我们去改进,其中一个思路是从单帧过渡到多帧,更多的利用多帧历史上的数据,去提高算法和系统的稳定性。像这样的例子,我们在雨天摄像头都已经沾上雨滴了,已经很难看清前面的路和车,尤其是中间的车道线已经很难看清。但是在这种若隐若无车道线上,如果用多帧,还是能找出一些规律来,所以这也是我们很重要的、依赖的一个方向。
5. 感知技术在量产化道路上的挑战
大家可以现在脑海里想一下,感知技术在量产道路上会遇到哪些挑战?
① 成本
首先第一点是成本,因为我们要量产的话,首先要讲究经济效益,毕竟是做生意,需要尽量在低成本的设备上实现我们的自动驾驶。所以,我们需要选用低成本的计算设备,低成本的摄像头,低成本的激光雷达等等。
一方面是为了经济效益,另一方面也是为了符合车规,大家可以去网上搜一下,知道车规的标准是什么样的,车规会对我们设备的电流、电压、功耗等等有非常严格的要求。
另外一点就是可靠性和安全性。对系统和算法的可靠性要求都是非常高的,尤其是在我们的系统上,不能跑着跑着,突然蓝屏了。所以,一些我们可能觉得很稳定,或者是很常见的操作系统和开源的软件,实际上是没法直接去用的,需要做一些专门的定制。
② 性能
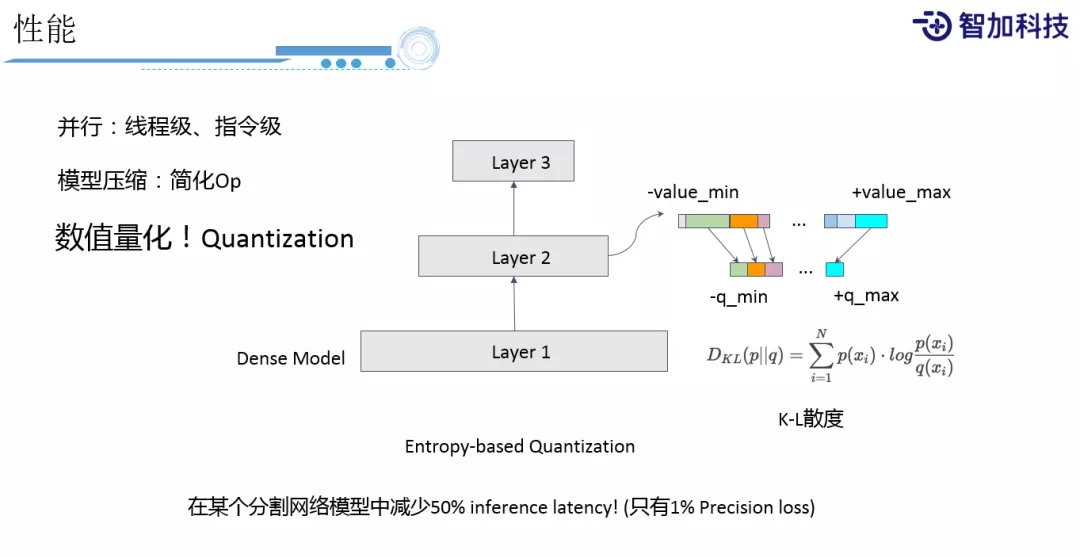
第二就是性能,我们在性能上除了会用一些特定的硬件,去做硬件加速。还包括软件上的一些传统方法,比如并行化这种优化,还有模型压缩的一些方法等等。还有一个很有效的一点,就是做数值量化,这里只是介绍一些我们的经验,因为大家知道我们在处理浮点数据,对 GPU 和 CPU 而言,它的性能要求还是非常高的,但实际上从整个数据的分布上来看,也不见得非得用这么高精度来表示数据。所以我们常用的方法就是量化,量化简单来做的话,可以做一个平均的量化,把一个 0 到 100 区间的数据,压缩到 0 到 10 区间,平均分成十份就可以了,这是最简的方法。但是,如果 0 到 100 区间中,这个数据的分布不是平均分布的话,这样做就会存在信息损失。所以我们会用基于 Entropy 的方法做量化,我们会看哪些数据,比较集中在多个区间上的,还是哪些数据,它在区间上是分布非常少的,这样在不同区间上,我们就可以有不同的在新的空间上的粒度,然后信息的损失,我们可以用 K-L 散度来计算出在老的区间上和新的区间上,它的熵的一个差值,去 min、max 差值来算出,这样一个新的区间应该怎样划分。图中是我们在数值量化上的一个应用,在我们的某个分割网络上的实践中,它能够减少 50%的 inference 时间,而且精度上,在我们内部测只有 1%精度的损失。这只是系统优化方法中的一点,还有很多环节需要优化。
③ 可靠性
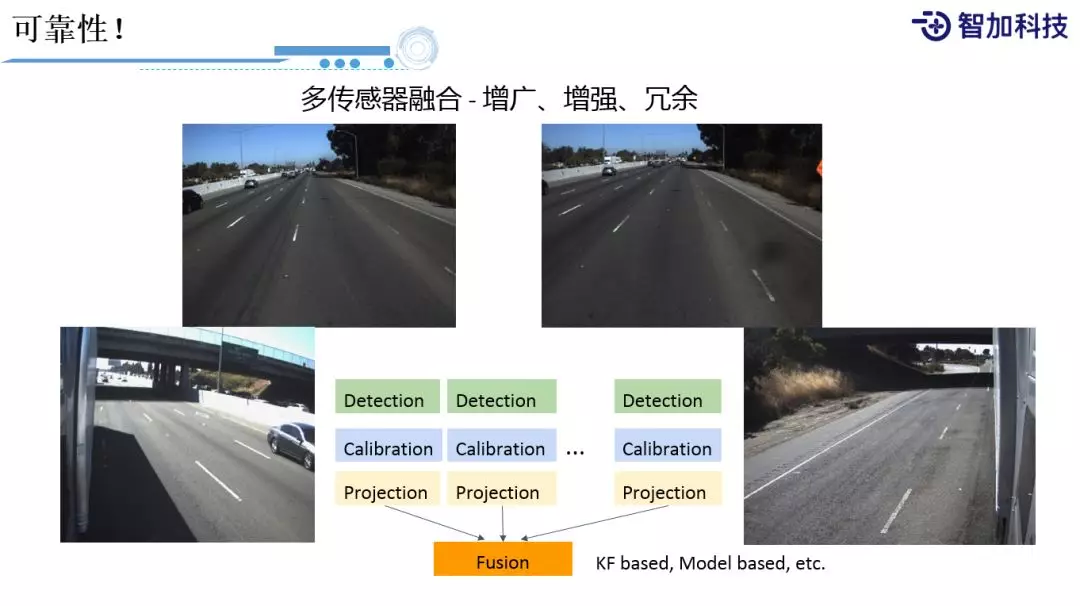
最后一点就是可靠性。刚才前面也介绍过,我们会有多个传感器,多个摄像头来提高它的冗余。有多个传感器之后,我们需要去想怎么把它们一起用起来,所以这里面我们还会有融合这样一个过程。比如,我们在测试车辆上装了前视的双目摄像头,还有后视的双目摄像头,只有当我们把多个传感器的数据映射到同一个空间上,并且把它们做一个融合处理,我们才能真正的把多个传感器的数据用起来。在这里面会有 KF based 的传统做法,也会有 Model based 的方法,受限于篇幅,这里就不做过多的展开了。
本次分享就到这里,谢谢大家。
作者介绍:
王超,智加科技技术专家
本文来自 DataFunTalk
原文链接:
公众号推荐:
跳进 AI 的奇妙世界,一起探索未来工作的新风貌!想要深入了解 AI 如何成为产业创新的新引擎?好奇哪些城市正成为 AI 人才的新磁场?《中国生成式 AI 开发者洞察 2024》由 InfoQ 研究中心精心打造,为你深度解锁生成式 AI 领域的最新开发者动态。无论你是资深研发者,还是对生成式 AI 充满好奇的新手,这份报告都是你不可错过的知识宝典。欢迎大家扫码关注「AI前线」公众号,回复「开发者洞察」领取。


分布式云行业实践指南(2023)
业内首个分布式云行业实践方法论、工具箱。







评论