看新闻很累?看技术新闻更累?试试下载 InfoQ 手机客户端,每天上下班路上听新闻,有趣还有料!
近期,苏黎世大学的一个研究团队公开发表了一篇研究论文,介绍了他们如何实现无人机在城市街道中安全飞行。
尽管早在一年前,Amazon 等企业就宣布将使用Prime Air 无人机系统送快递,但是无人机很少能实现穿行在城市建筑间。主要原因在于从城市街道层面看,无人机的路线规划并非易事,其中存在着大量的障碍物。为克服这些挑战,研究团队尝试创建一种可感知无人机运动方向的估计程序。该想法类似于该团队于2016 年公开发表的无人机自动巡航森林小径的研究成果。
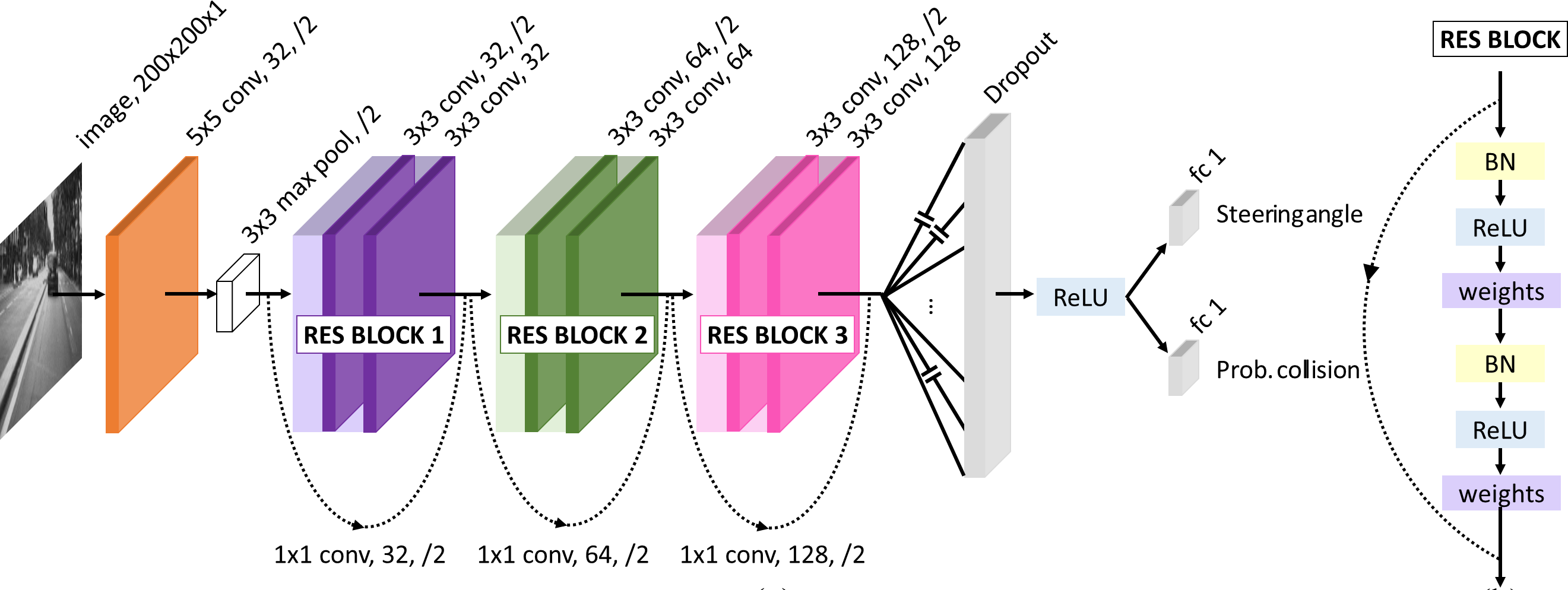
研究人员创建了一个深度神经网络,用于预测转向角,并估计可能发生的碰撞情况。他们使用残差网络(Residual Network)训练神经网络架构,进而生成了用于导航无人机的转向角,并估计了发生碰撞的可能性。无人机可以根据这些估计,识别出危险情况并做出相应的响应。
该项研究的一个重要贡献在于团队所使用的训练数据采集方式。虽然使用训练有素的无人机操作人员可以采集到针对多种情况的数据,但是这种做法需要耗费大量的时间。研究人员创立另一种训练神经网络的方法,他们使用了采集自汽车和自行车的数据。其中,预测转向角的数据集使用了Udacity 训练集( https://medium.com/udacity/challenge-2-using-deep-learning-to-predict-steering-angles-f42004a36ff3 )。在每幅图像中,还包括了汽车的转向角。这样,研究人员可以使用神经网络预测汽车转向角,进而尝试将这一预测行为克隆到无人机场景中。此外,研究人员通过在自行车上安装摄像头并骑向汽车等障碍物,收集了研究所用的碰撞数据集。使用这种方式采集的训练数据,可以训练神经网络预测无人机是否接近了障碍物。
研究人员在YouTube 上视频展示了研究成果,并以论文形式公开发表( http://rpg.ifi.uzh.ch/docs/RAL18_Loquercio.pdf ),源代码发布在GitHub 上。
查看英文原文: Neural Networks Trained on Images for Autonomous Vehicles Allow Drones to Navigate Through Streets




