
1. 导读
高德定位业务包括云上定位和端上定位两大模块。其中,云上定位主要解决 Wifi 指纹库、AGPS 定位、轨迹挖掘和聚类等问题;端上定位解决手机端和车机端的实时定位问题。近年来,随着定位业务的发展,用户对在城市峡谷(高楼、高架等)的定位精度提出了更高的要求。
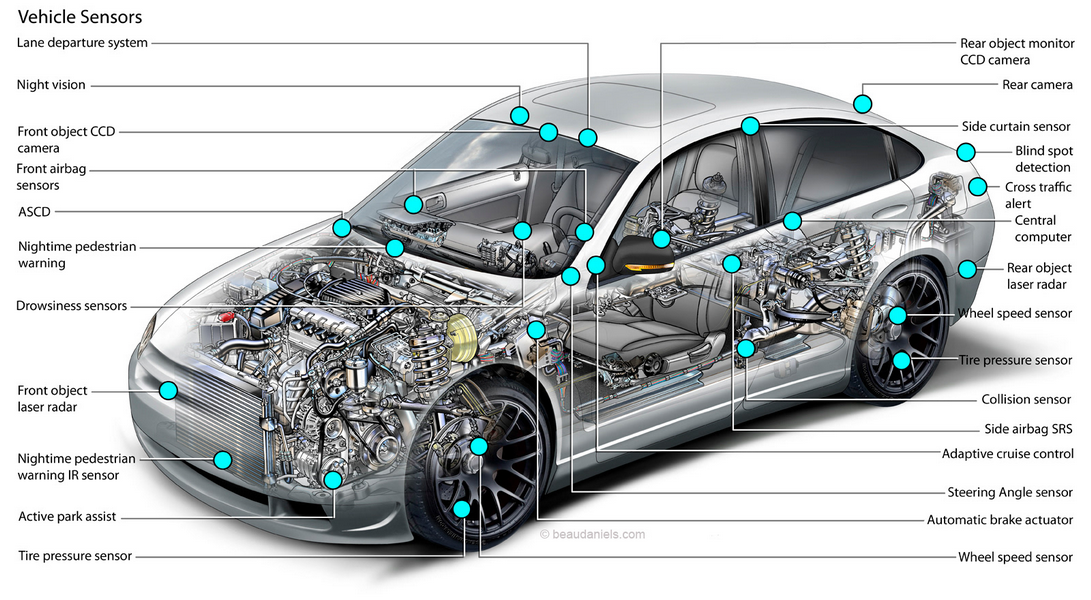
特别是车机端定位,由于定位设备安装在车上,一方面,它可以搭载更丰富的定位传感器来解决特殊场景的问题,另一方面,各个传感器之间相互固连,有利于高精度的算法设计。这两点为车机端进一步提高导航精度的提供了可能。
城市峡谷一直是车机端定位的痛点。原因是城市峡谷的环境使用户无法接收到 GPS 信号或 GPS 信号受干扰,导致 GPS 无定位结果或定位精度差。这是“有源定位”固有的缺点,无法从算法上来克服。
针对这个问题,以 GPS+IMU 的多传感器融合方案越来越受到重视,因为“无源定位”的 IMU 恰好可以弥补 GPS 的短板。此外,车机还可以搭载里程计、视觉设备形成更丰富的多传感器融合方案。
对高德而言,地图数据是定位业务的灵魂。多传感器融合只是定位业务中的一部分,如何把多传感器与地图数据结合起来,始终是我们在思考的问题。
针对车机应用,我们使用 GPS、IMU、里程计等传感器,结合高德地图的地图优势,提出了一种结合地图匹配(Map Matching)的多传感器融合算法——GPS/IMU/MM 融合(软件+硬件的解决方案)。
本文概述了车载多传感器融合定位项目背景,该项目确立是为了向用户提供好的导航定位服务。为了解决用户反馈的三大痛点问题:偏航重算、无法定位和抓路错误,结合算法和数据,提出了一套软件+硬件的解决方案。最后,用实测数据验证对用户反馈问题的改善程度。
2. 车载应用的痛点
偏航重算:是指在高架或城市峡谷,信号遮挡引起位置点漂移;
无法定位:是指在无信号区域(停车场、隧道)推算的精度低,导致出口误差大;
抓路错误:是指主辅路、高架上下抓路错误。
其中,导致偏航重算和无法定位直接原因是 GPS 定位精度差和 DR 航位推算精度差。GPS 定位精度由观测环境决定,难以改善;DR 航位推算精度与 DR 算法性能有关,尤其是里程计系统误差和陀螺零偏的标定精度。对于抓路错误,直接原因是正确道路与误抓道路相隔太近,受定位精度限制无法区分;根本原因是只使用位置信息进行抓路,没有发挥其它数据的价值。

图 1 用户痛点问题
3. 相关名词
GPS(GlobalPositioning System):指美国国防部研制的全球定位系统。用户设备通过接收 GPS 信号,得到用户设备和卫星的距离观测值,经过特定算法处理得到用户设备的三维坐标、航向等信息。使用不同类型的观测值和算法,定位精度为厘米级到 10 米级不等。GPS 的优点是精度高、误差不随时间发散,缺点是要求通视,定位范围无法覆盖到室内。
IMU(Inertial measurementunit):指惯性测量单元。包括陀螺仪和加速度计。陀螺仪测量物体三轴的角速率,用于计算载体姿态;加速度计测量物体三轴的线加速度,可用于计算载体速度和位置。IMU 的优点是不要求通视,定位范围为全场景;缺点是定位精度不高,且误差随时间发散。GPS 和 IMU 是两个互补的定位技术。
MM(Map matching):指地图匹配。该技术结合用户位置信息和地图数据,推算用户位于地图数据中的哪条道路及道路上的位置。
4. 技术方案
车机融合定位项目解决的是道路级的定位问题,受限于硬件性能,目前市场上通用的技术方案有两种,如下表 1 所示:
表 1 通用方案
这两种技术方案涉及到 3 种技术手段,在场景覆盖和精度上,它们各有所长,互相补充。如表 2 所示:
表 2 技术手段
表 1 表明,目前市面上存在的通用方案并不能完全解决偏航重算、无法定位和抓路错误这三个问题,尤其是抓路错误。为此,在技术层面上,我们将两套通用方案进行融合,提出了一套软+硬(GNSS+MM+DR)方案;在算法层面上,依靠高德的数据优势,以数据融合模块为核心,一方面提高定位结果可靠性,弥补硬件性能上的不足,另一方面对抓路错误问题进行专门的算法设计。更进一步,将用户反馈的三个问题解构为算法上解决的三个问题:器件误差标定、场景识别和数据融合。如图 2 所示:

图 2 业务问题解构图
5. 功能模块
车机融合定位包括数据适配层(DataAdaptive Layer)、算法支撑层(Aided Navigation Layer)和融合层(NavigationLayer)。数据适配层负责将不同输入标准化、将信号同步;算法支撑层计算中间结果,为融合层服务;融合层是整个系统的核心,它负责融合算法支撑层输出的数据,得到可靠的导航信息。图 3 列出了各层所处位置及每个层的具体功能模块:
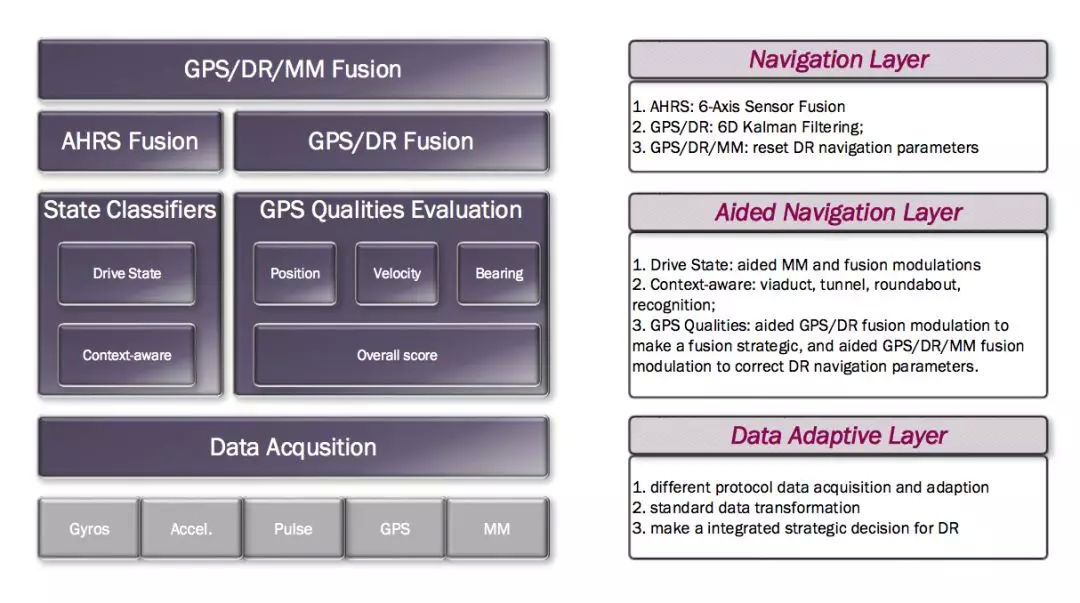
图 3 算法框架
下面,将功能模块分为基础模块和特色功能两个部分分别进行介绍。
5.1 基础模块
5.1.1 GPS 质量评估
GPS 质量评估模块的功能是计算 GPS 位置、速度、航向角和全局可靠性指标。根据可靠性指标的大小将其投影到状态空间(GOOD、DOUBT、BAD、ABNORMAL)中,状态空间的值表征 GPS 数据质量的好坏。如图 4 所示:
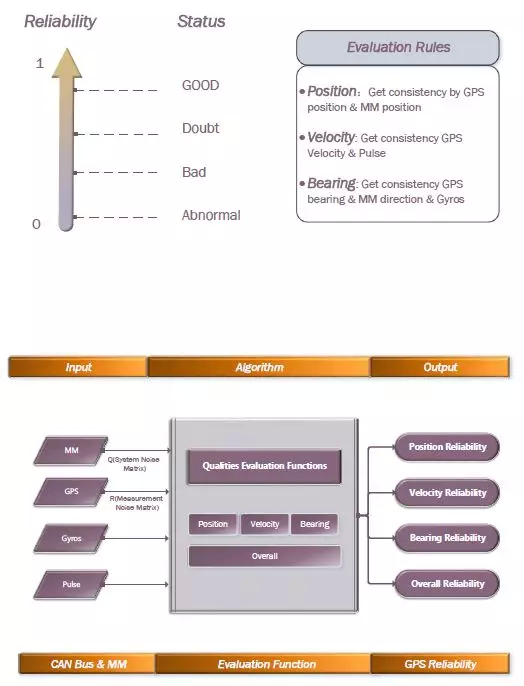
图 4 GPS 质量评估模块
评估 GPS 质量有两个目的:第一,决定是否使用 GPS 数据进行器件误差标定或某些状态的判断(如转弯行为、动静状态等);第二,在数据融合模块,为设定 GPS 观测量的方差—协方差阵提供参考。
5.1.2 器件补偿
无 GPS 信号环境时,定位只能依靠 DR 算法。DR 算法精度主要取决于 IMU(陀螺仪和加速度计)和测速仪的误差,陀螺仪误差将引起位置误差随时间的二次方增长,测速仪误差将引起位置误差随时间线性增长,如图 5 所示:
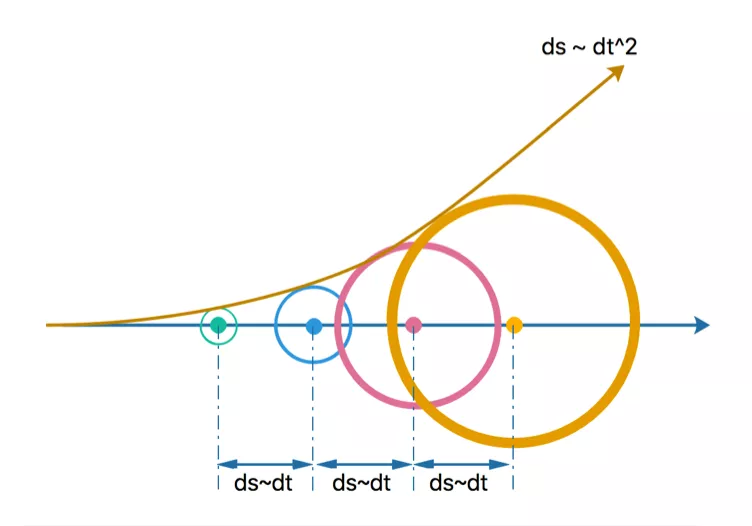
图 5 位置误差与陀螺仪误差的关系
为改善无 GPS 信号环境的定位精度,必须进行器件误差补偿。
补偿模块的主要功能是利用 GPS 数据来补偿速度敏感器误差参数(比例因子)和 IMU 的误差参数(陀螺仪天向比例因子和陀螺仪三轴零偏)。补偿的目的是在无 GPS 信号或弱 GPS 信号的场景,仅靠 DR 算法也能得到较为可靠的导航信息。
5.1.3 DR 算法
DR(DeadReckoning,航位推算)算法是指已知上一时刻导航状态(状态、速度和位置),根据传感器观测值推算到下一时刻的导航状态。DR 算法包括姿态编排和位置编排两个部分。
姿态编排使用的是 AHRS(Attitude andheading reference system )融合算法,处理后输出车机姿态信息。姿态编排流程如图 6 所示:
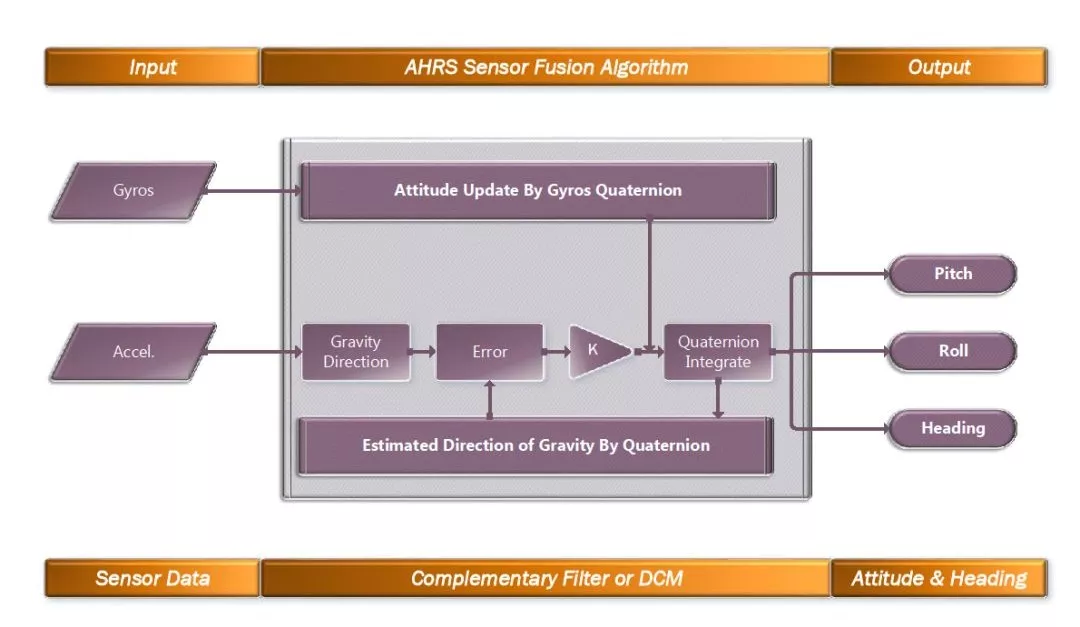
图 6 AHRS 融合算法
位置编排是指结合姿态编排结果,对测速仪观测值进行积分后得到车机位置。
5.1.4 融合算法
车机融合定位项目使用了 GNSS、MM 和 DR 三项技术,每项技术能够提供全部或部分车机导航信息,如表 3 所示。以位置信息为例,GNSS、MM 和 DR 都输出车机位置,但由于不同技术手段有各自的误差源,致使不同技术的定位结果并不相同。
表 3 GNSS/MM/DR 提供的导航信息
|技术|位置|速度||姿态|
|-|-|-|-|
|GNSS|提供|提供|部分提供(航向角)|
|MM|提供|——|——|
|DR|提供|提供|提供|
因此,融合算法有两个目的:第一,将不同技术的导航信息融合成唯一导航信息,使之可靠性高于未融合前的;第二,估计器件误差(陀螺仪零偏、测速仪尺度误差和导航误差等)。
融合算法基于 Kalman 滤波实现,其关键在于模型建立和模型参数设置。Kalman 滤波模型由状态转移方程和观测方程构成。状态转移方程表示相邻导航状态之间的转移关系,它通过构建导航误差微分方程实现;模型参数是指状态转移噪声和观测噪声,观测噪声的设置与 GPS 质量评估模块相关。
经 Kalman 滤波处理后,得到导航误差的最优估值,如图 7 所示。即经过补偿得到了导航信息的最优估值。
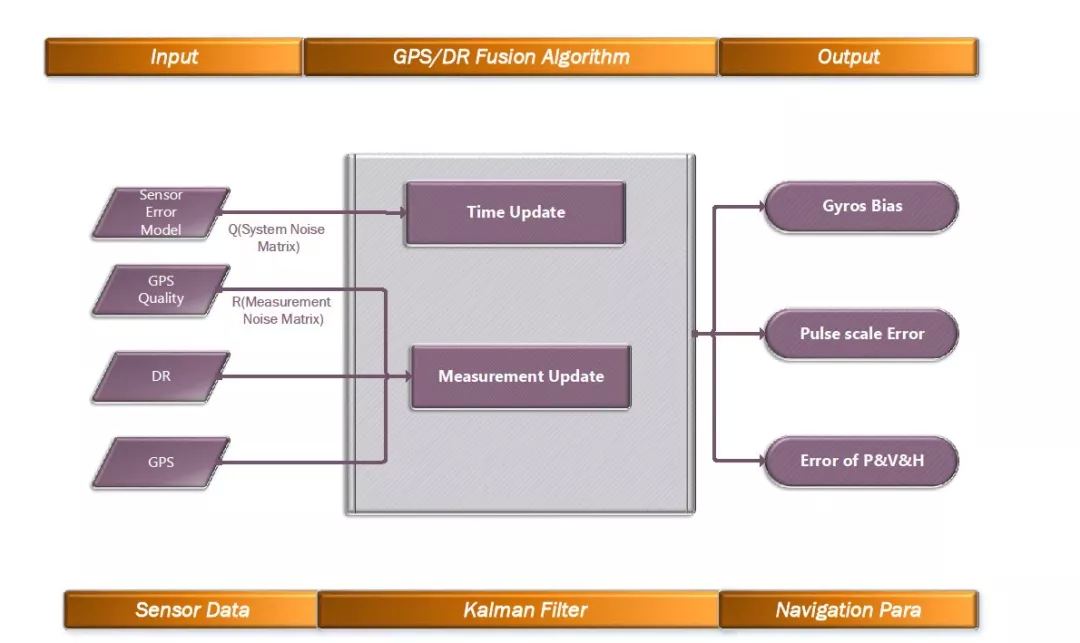
图 7 融合算法模块
5.2 特色功能
5.2.1 主辅路识别
以往的主辅路识别策略是通过 DR 输出的位置和方向与两条候选路的关系,选择最接近的候选路作为输出。但对于道路级定位系统而言,DR 输出误差与两条路的差异在同一量级,误判的概率较高,所以,需要从一些驾驶特征来解决此问题,例如,路口附近的转弯、变道等。

图 8 主辅路街景
如图 9 所示,具体步骤为:
提取驾驶行为特征,求特征信息的转移概率;
根据 DR 精度分类计算卷积和,求最终概率。
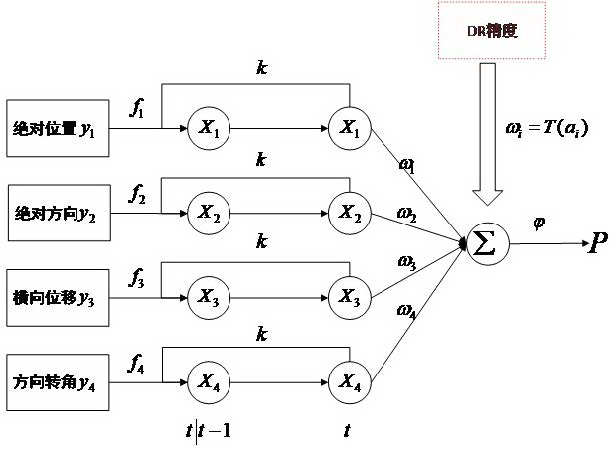
图 9 主辅路识别算法
5.2.2 高架识别
过去,高架识别策略是通过高程积分和阈值法来判断,识别效果受坡角误差和速度误差的影响。其中,速度误差与高程积分误差成正比,是影响高架识别准确率的主要原因。为克服这一缺点,我们结合 MM 技术,计算道路坡度与输出 pitch 角的接近程度(如图 11 所示),以避免引入速度误差。高架识别流程如图 12 所示:

图 10 高架街景
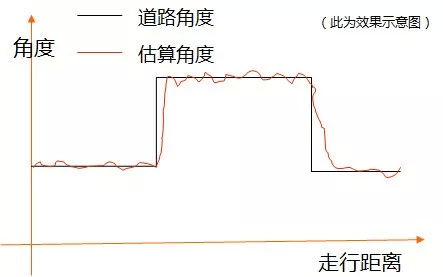
图 11 估算角度与道路角度匹配
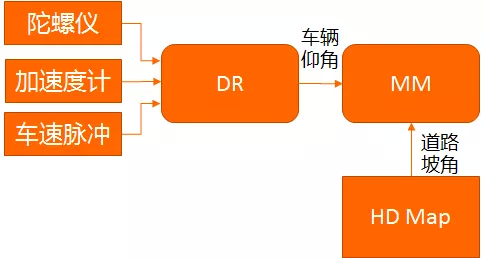
图 12 高架识别流程
5.2.2 停车场识别
停车场识别是新增模块,是停车场定位导航的前置工作。停车场定位导航的主要目的是将车机用户导航到指定的停车位,其中涉及到室内外场景地图切换、层与层地图切换和导航等一系列问题。停车场识别的目的就是为这地图切换提供支持。
停车场内容包括进出停车场识别和跨层识别。进出停车场识别是指利用停车场无 GPS 信号、上下坡、低速、高程变化等一系列特征判断车机是否进出停车场。停车场跨层识别是指利用上下坡、高程变化等特征判断车机是否在停车场内有跨层行为。识别流程如图 13 所示:
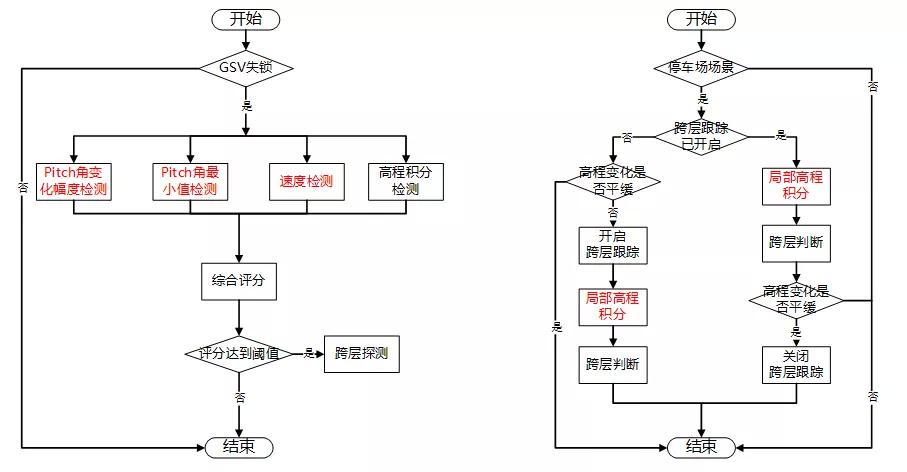
图 13 停车场识别流程图 (左:进出停车场识别,右:跨层识别)
6. 效果
为验证本项目算法的效果,我们采集了实测数据,并从以下两方面验证:
验证算法对用户痛点问题(偏航重算、无法定位和)的改善程度;
与竞品及高德手机定位端产品性能的比较。
6.1 融合抗漂
针对高架和城市峡谷的偏航重算(位置漂移)问题,车机算法做了以下两点改进:
多元参考:结合运动趋势、传感器信息和地图数据,将 GPS 可靠性归一化;
场景分类:参考地图道路属性和 GPS 信号分布判断是否有遮挡。
在高架下采集两圈数据,使用车机软件和市场某款同类软件进行处理,效果如图 14 所示。从近半年的测试来看,在 GPS 受遮挡的场景下,本项目的抗漂能力明显优于传统方案。
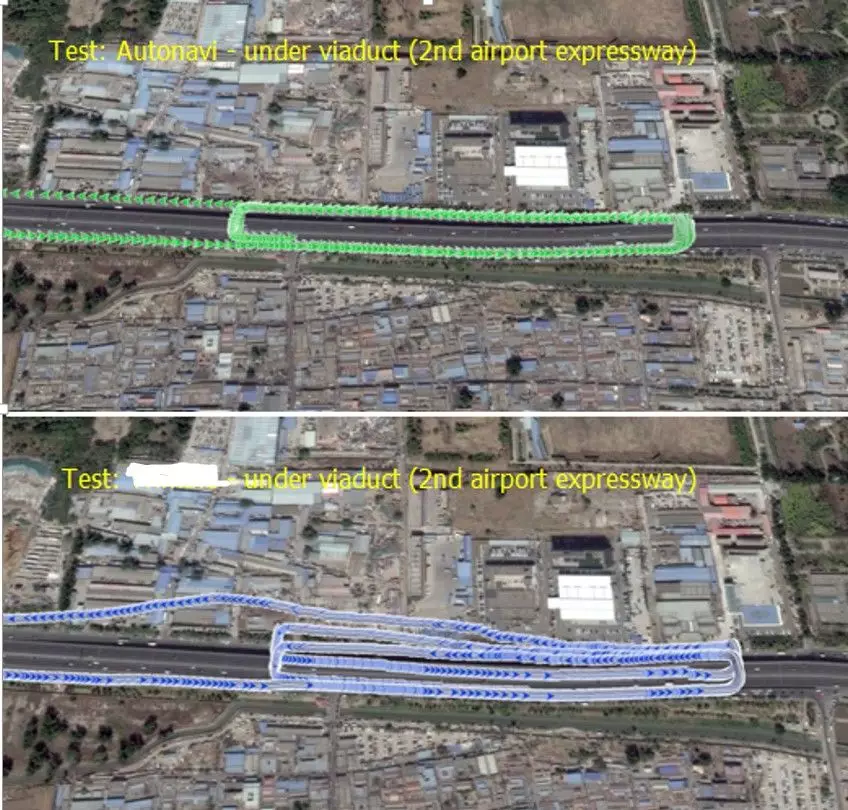
图 14 融合抗漂效果(上图为车机算法,下图为市场某同类产品)
6.2 器件标定
为验证有无陀螺仪动态零偏估计对 DR 方向和位置解算精度的影响,本项目采集了望京 soho 停车场的数据,经解算,效果如下。测试表明,经动态零偏补偿后,DR 精度明显提高:
零偏:动态零偏估计保证陀螺仪误差量级为 0.01 度/s;
方向:停车场出口出的方向误差减小至 40%以内,方向精度提升 2 倍以上;
位置:停车场出口处的位置误差减小至 25%以内,位置精度提升 4 倍以上。
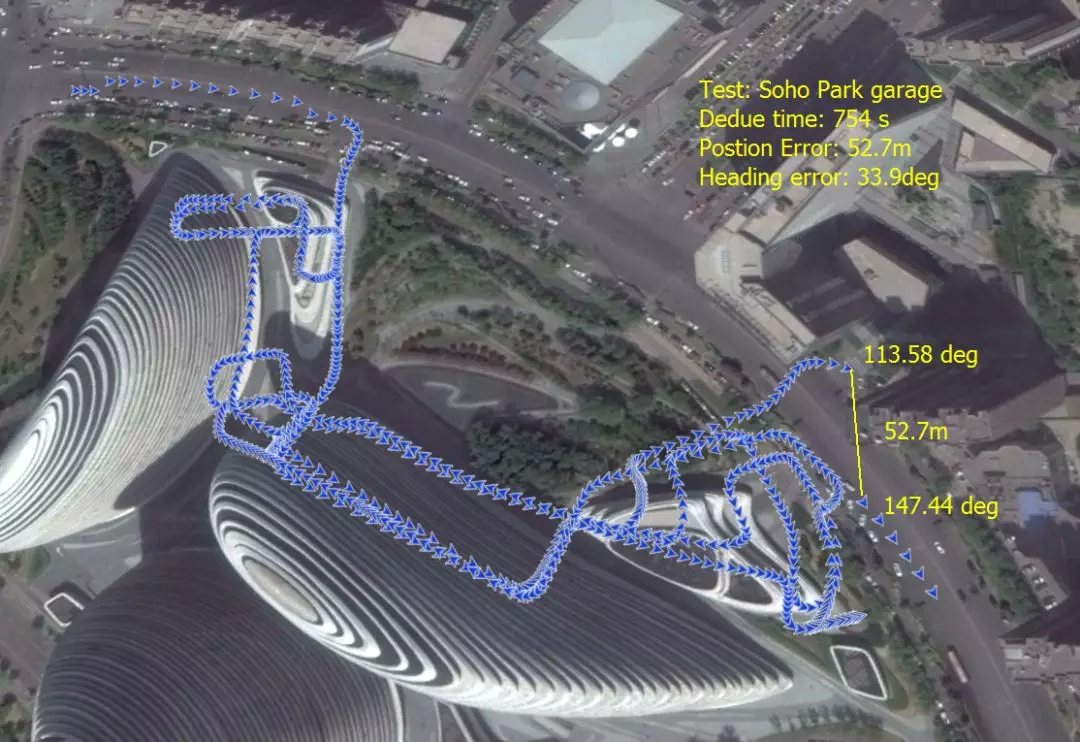
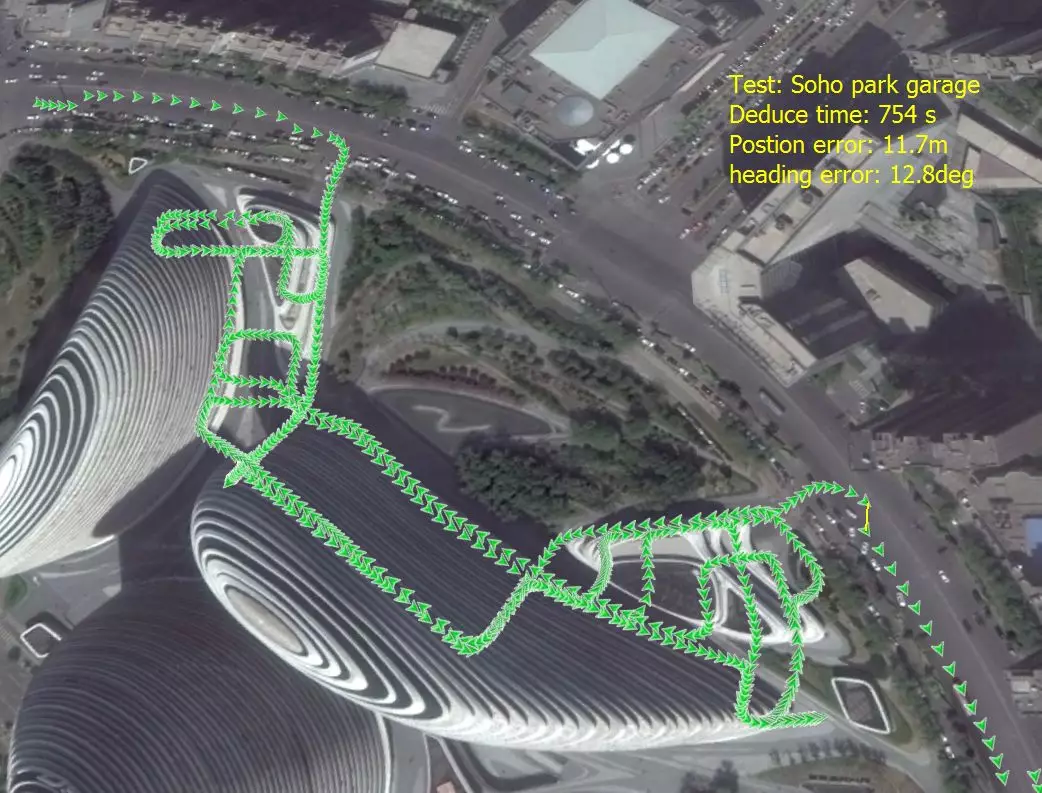
图 15 soho 停车场(左:无动态零偏估计,右:有动态零偏估计)
6.3 主辅路识别
为计算主辅路识别的成功率,统计了近千条主辅路的识别效果,识别率达到 90%以上,大于某厂商产品的 75%。
6.4 横/纵向对比
最后,我们与市面的中高端竞品进行了横向对比,与高德手机端定位产品进行了纵向对比。横向对比结果表明,在器件成本不到竞品成本 10%的情况下,不超过某一阈值的位置误差、方向误差和速度误差的占比均在 90%以上,相对竞品,提高了 1%~5%。主辅助路识别准确率优于 90%,相对于竞品提高了 15%。
纵向对比结果表明,在不同场景(高架,城市峡谷,环岛,停车场出口等)下,不超过某一阈值的位置误差占比提升 15%~60%不等,这是因为车机算法对特殊场景(无 GPS 或弱 GPS 场景)进行了专门的算法设计和优化。全场景下的位置误差占比提升约 20%。
7. 小结
针对用户提出的三大痛点问题,本文结合多传感器融合和地图匹配,提出了一套车载多传感器融合定位方案,并应用于实际,提高了在城市峡谷中的定位精度,并且取得了不错的效果。
然而,城市峡谷的定位精度问题很难彻底解决,它似乎是一个没有终点的难题。为此,站在用户的角度,我们需要不停思考:需要什么样的传感器技术、应该设计什么样的算法、如何挖掘数据的最大价值。
本文转载自公众号高德技术(ID:amap_tech)。
原文链接:
https://mp.weixin.qq.com/s/9-ztM-r6i8k-Knmco7ipjA
Java 避坑指南:Java 高手笔记代码篇
本迷你书包括 86 个业务开发中常见踩坑点。每一个知识点都相当的实用,是程序员业务开发中的必备避坑指南...











评论