
近日,毫末智行人工智能中心技术团队论文《Safety-balanced driving-style aware trajectory planning in intersection scenarios with uncertain environment》(不确定性路口场景下基于驾驶风格识别的安全轨迹规划)被 IEEE TIV 录用。IEEE Transactions on Intelligent Vehicles (IEEE TIV,IEEE 智能车汇刊)是智能车专业学术期刊。
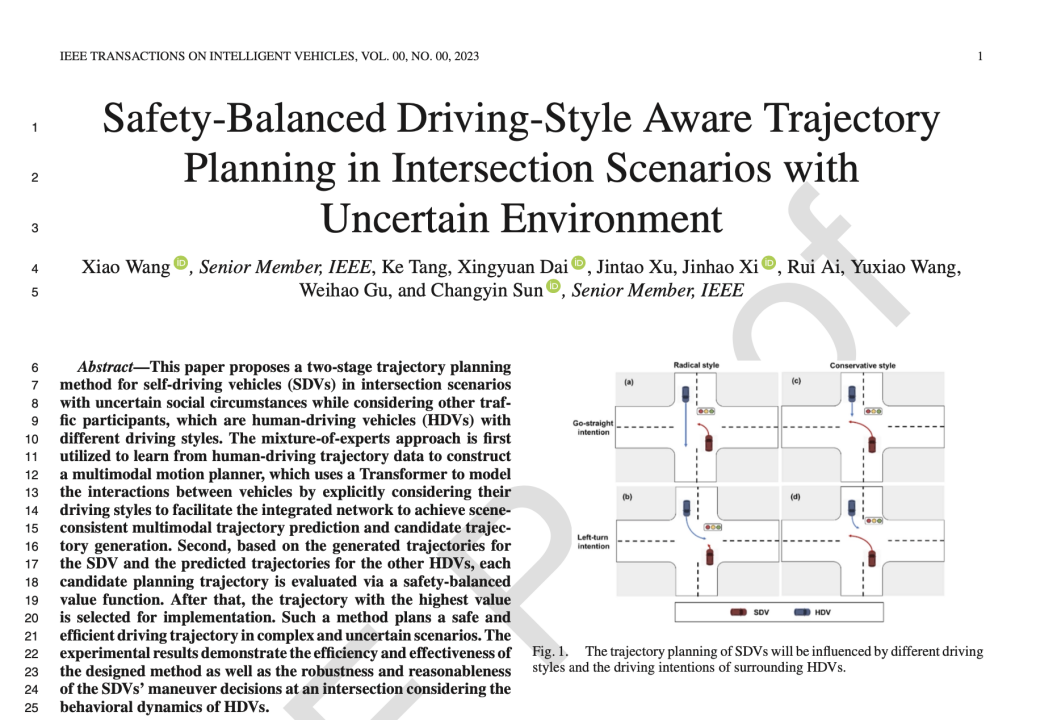
据介绍,该论文针对高动态的不确定性路口场景,考虑周围人类驾驶车辆(HDVs)的驾驶风格,提出了一种两阶段自动驾驶车辆(SDVs)轨迹规划算法。该方法在复杂不确定性场景中实现了安全、高效的驾驶轨迹规划。实验结果证明了所提出方法在不确定性路口场景的规划效率和有效性,通过考虑路口场景下 HDVs 的驾驶风格与意图动态,SDVs 能够做出更鲁棒、合理的规划行为。

这种安全平衡的轨迹规划方法,包含候选轨迹生成与安全轨迹选择两个阶段。
首先,在候选轨迹生成阶段,毫末构建了一个考虑周围车辆驾驶风格的多模态联合预测与规划模块。该模块输入以自车为中心的鸟瞰视角语义图,包括高清地图和其他车辆智能体的向量化表征。通过 Transformer 对车辆之间交互进行编码,同时显示建模周围其他车辆的驾驶风格,并将识别的车辆驾驶风格作为条件约束,协助轨迹解码网络实现交互感知的联合预测和规划。该过程为自动驾驶车辆生成候选轨迹。
然后,在轨迹选择阶段,基于第一阶段生成的候选轨迹与对其他车辆的预测轨迹,结合道路信息,通过安全敏感的轨迹评估函数对每个候选规划轨迹进行评分,最终选择安全评分最高的轨迹用于控制器的最终执行。
毫末团队通过实验对比了所提出方法与 4 种基于模仿学习的轨迹规划方法,包括基于图像输入的行为克隆(BC-I),基于图像输入与轨迹扰动数据增强的行为克隆(BC-IP),基于语义向量输入的行为克隆(BC-V),基于语义向量输入与轨迹扰动数据增强的行为克隆(BC-VP)。在自动驾驶仿真平台 L5kit 上的闭环测试实验结果显示,所提出的方法与其他基准方法相比,碰撞与越野次数大幅降低,显示出所提出的轨迹规划方法具有更高的安全性与轨迹合理性。在自动驾驶仿真平台 L5kit 上的开环测试结果显示,所提出的方法仍然领先基准 BC-VP。
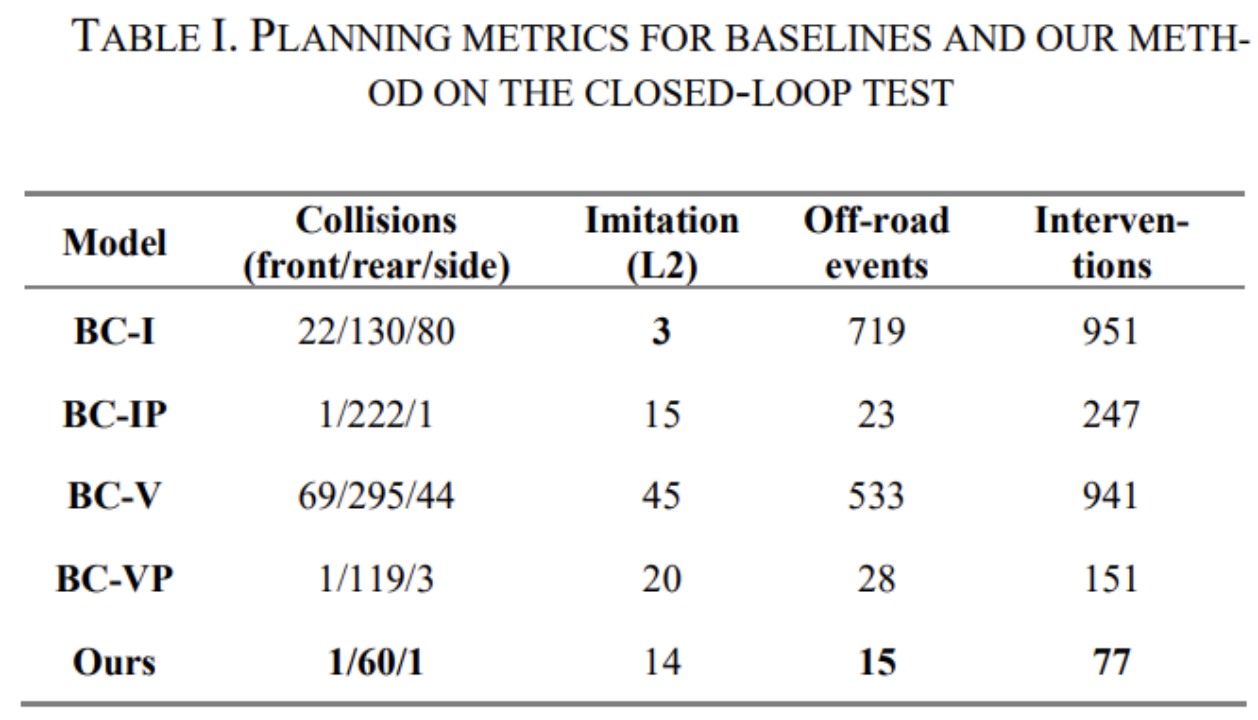
闭环测试中基准方法与所提出方法的规划指标对比结果
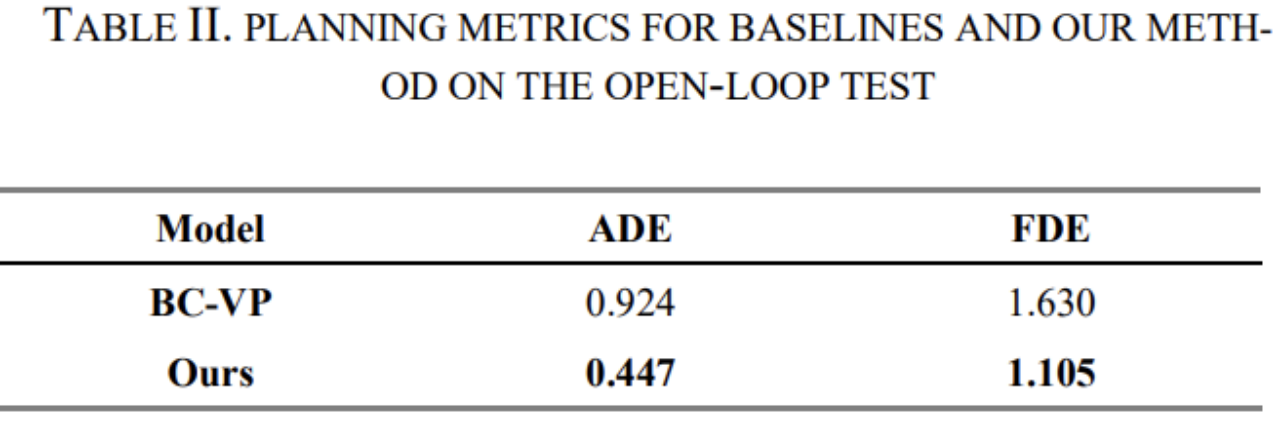
开环测试中基准方法与所提出方法的规划指标对比结果
通过闭环测试消融实验,毫末验证了驾驶风格识别与安全校验模块在降低碰撞率与越野次数的作用,且能够使得所规划轨迹更接近人类驾驶轨迹。
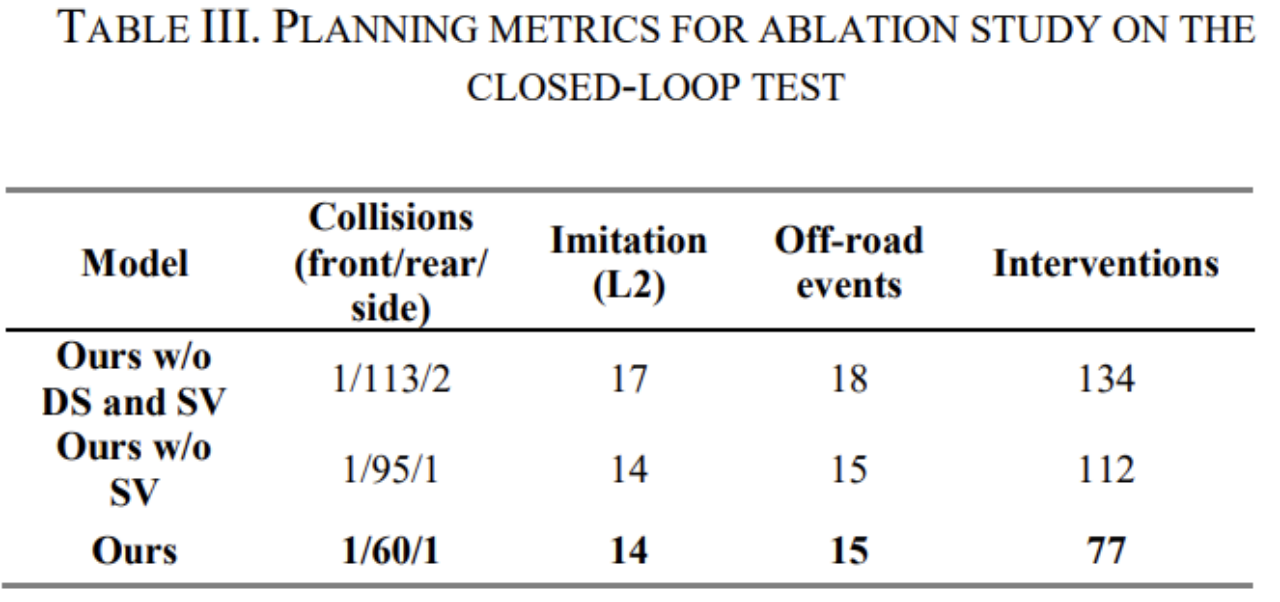
闭环测试消融实验的规划指标结果
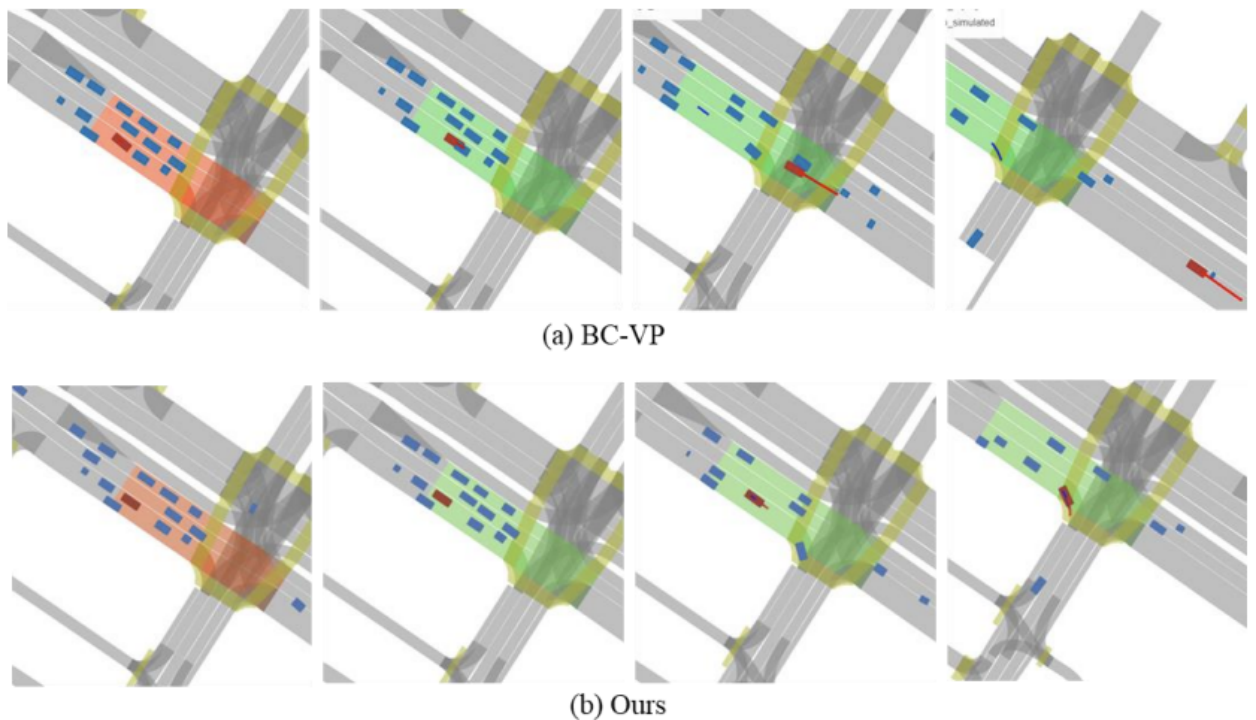
在公开数据集的可视化结果中,一个典型路口场景的可视化结果显示,所提出的轨迹规划方法可以使红色自动驾驶车辆在路口处等待红灯并停车,等到绿灯亮起后恢复行驶,同时保持与其他车辆的安全距离并沿着预定路线行驶。规划的轨迹与人类实际驾驶车辆的蓝色参考轨迹非常接近。相比之下,基于基准 BC-VP 规划器的车辆闯红灯并撞击其他车辆,同时没有按照预定路线行驶。
在公开数据集的可视化结果




