


1971 年出生的埃隆·马斯克 Elon Musk)拥有加拿大和美国双重国籍,有人说他是当代硅谷“钢铁侠”,也有人说他抽最猛的“烟”、吹最大的“牛”,常说的特斯拉全自动驾驶老跳票。本文简单梳理特斯拉自动驾驶信息,重点综述 Tesla Autopilot AI 计算机为核心的自动驾驶,从 TeslaAutoPilot 1.0 的辅助驾驶,到 TeslaAutoPilot 3.0 和全新的 Hardware1.0 的全自动驾驶的硬件时代。
1. 特斯拉自动驾驶宣传、数据、事故简介
1.1 特斯拉自动驾驶宣传
特斯拉 2016 年 10 月后生产的车型都具备完整的全自动驾驶硬件。在 2016 年 10 月到 2018 年 10 月间的特斯拉对外宣传声称,一旦 Autopilot 全自动驾驶功能研发成功,用户花 3000 美元就能升级软件包。2017 年 1 月,Musk 表示初步的全自动驾驶功能将在 3-6 个月内实现,但他食言了。2017 年底,马斯克要让一辆特斯拉全自动驾驶穿越美国东西海岸,现在都 9102 年了…之后他依然不断声称全自动驾驶功能快来了,但每次翘首企盼的用户都会以失望收场。最近,Elon Musk 又对外表示,特斯拉全自动驾驶功能年末就能完成,给他一年时间(即 2020 年),甚至敢让司机在驾驶席睡大觉,整个过程不需要车主动个指头。“我认为特斯拉今年就能在功能端完善全自动驾驶,这就意味着车辆能在停车场找到你,然后拉上你直接奔向目的地,期间完全不需要车主干预。这次我非常肯定,大家不用再打问号了。”Musk 在接受资金管理公司 ARK Invest 采访时说道,这家公司也是特斯拉的股东之一。
攻克高速公路后,特斯拉 Autopilot 团队转向交叉路口处理,这活可不好做。Musk 说,“从我们的研发进度来看,Autopilot 系统识别停车标志和交通信号灯早已不在话下。不过在一些复杂交叉路口,系统面对一些模糊不清的情况还是会犯晕,比如说到底要看哪个灯。这种情况别说机器了,有时候人都弄不清。这也是我们在努力解决的问题。”特斯拉很明智地先做高速路况的自动驾驶,相对于其他路况要简单得多(没有自行车和行人且形式较为统一)。但 2016 年 10 月以来,特斯拉并没有展示过任何全自动驾驶功能,当年 ModelS 自行驾车驶过北加州社区的宣传视频是 Musk 唯一拿得出手的“自动驾驶高光时刻”。最近上交给加州车管所的报告中,特斯拉刻意回避,声称“自己从未在加州公路测试或运营过任何自动驾驶模式的车辆”。采访中 Musk 还指出,特斯拉 Autopilot AI 计算机“即将量产”,并宣称新产品将现有技术提升了 2000%,有点吓人。
多数用户购车时会多花 5000 美元解锁增强版 Autopilot 功能,但其实只是套 ADAS 系统,“增强版 Autopilot 能引导车辆从匝道驶上高速,此外还能建议车主或直接替车主完成并线工作。当然,引导车辆在立交桥通行或驶下匝道也不在话下。”特斯拉在驾驶员手册中写到。不过,无论 Musk 再怎么承诺,这样便利的体验在偏僻小路、停车场和城市中还是无法实现。
不同于特斯拉,2018 年末,Waymo 自动驾驶打车服务“低调”亮相时,不对公众开放并将安全驾驶员拉回驾驶舱。WaymoCEO John Krafcik 也不得不承认,“自动驾驶这项技术实在是太难了。”一直追赶 Waymo 的通用按计划今年要推自动驾驶打车服务,但对时间和地点却三缄其口。Uber 自从在坦普出了人命,其自动驾驶项目就一直处在风雨飘摇中。Nuro 和 Aurora 这样的自动驾驶新贵,则变得更加稳健,谨慎和低调成了它们的座右铭。
1.2 特斯拉 20 亿公里 Autopilot 数据

特斯拉新款车型在美国弗里蒙特工厂完成装配工作,代表着特斯拉已经从第一代 Autopilot 硬件向其第二代硬件转型过渡,以逐步达到 3 级和 4 级的自动驾驶,最终实现全自动驾驶功能。但外界尤其汽车行业,质疑特斯拉是否能凭借其新型 Autopilot 硬件装备实现 5 级全自动驾驶汽车。伊隆·马斯克曾说研发自动驾驶系统需要数十亿英里的数据支持,否则很难让监管机构相信系统是安全可靠的。显然,特斯拉有很多自动驾驶数据,使得特斯拉研发全自动驾驶汽车充满信心。
特斯拉已从其第一代 Autopilot 硬件套件中累计收集 13 亿英里(约 20 亿公里)数据,而且几乎所有数据都对第二代 Autopilot 有用。Electrek 报道称,特斯拉的车队已累计行驶了 30 亿英里(约 48 亿公里),其中有 13 亿英里不是使用 Autopilot 功能行驶,而是由装配第一代 Autopilot 硬件的特斯拉汽车所行驶的。即使汽车没有激活 Autopilot,特斯拉仍然收集驾驶数据,用来增强机器学习并改进 Autopilot 项目:Autopilot、增强版 Autopilot 以及全自动驾驶功能。截至 2018 年 5 月,实际通过 Autopilot 功能行驶里程数接近 3 亿英里(约 4.8 亿公里)。相比 2016 年 5 月,当时特斯拉公布其累计收集到装配 Autopilot 硬件的汽车 7.8 亿英里(约 12 亿公里)的行驶数据,其中通过 Autopilot 功能行驶了近 1 亿英里(约 1 亿 6000 万公里)。
特斯拉在不到六个月的时间里,收集到的装配 Autopilot 硬件汽车行驶总英里数增长超过 60%,同时通过 Autopilot 功能行驶的英里数大约也是之前数据的三倍。特斯拉 Autopilot 项目主管斯特林·安德森向外界描述,在 Autopilot 未被激活情况下,将会在其开发过程中使用 Autopilot 硬件。截至 2018 年 5 月,装配第一代 Autopilot 的车队已迅猛增长至超过 10 万辆汽车,虽然当前特斯拉正向其第二代 Autopilot 硬件过渡,但开发过程大致相同。
正如 Electrek 报道的,特斯拉一天所收集到的自动驾驶英里数比谷歌自 2009 年建立程序就已录入的全部数据还多。但两家公司收集的数据集有很大差别。特斯拉的传感器套件并没有谷歌的那么精确,但该公司正在对其第二代传感器作出相应改进,使其更有利于用户使用。截止 2016 年 10 月底,谷歌累计收集到近 350 万英里(500 万公里)数据(220 万英里的自动驾驶数据和 130 万英里手动驾驶数据),而且谷歌仅 50 多辆汽车的车队每周可增加近 25000 英里(约 4 万公里)的行驶数据。
另外,目前特斯拉每天都可从其第一代 Autopilot 收集到数百万英里的行驶数据。然而,目前由 TeslaVision 项目研发 360 度相机,支持更大范围的可视信息,加之更加先进的超声学及特斯拉新雷达技术,第二代 Autopilot——目标可以像谷歌的汽车实现全自动驾驶功能——应该可以在 2017 年下半年赶上第一代所数据采集量。公正地说,虽然谷歌公司没有利用庞大的车队来收集和特斯拉相似的数据,但该公司每天在实验室中会增加 300 万英里(约 480 万公里)的模拟数据。
1.3 特斯拉自动驾驶事故
特斯拉汽车出过多起事故,都是在开启 Autopilot(特斯拉的自动驾驶技术,实际上只是驾驶辅助)情况下汽车未能识别障碍物而发生的碰撞事件。严重有撞上大挂车司机当场死亡的,轻的也有不能识别马路牙子接连撞了 12 个桩子的,无一例外的是,在事故发生的时候司机的手是离开方向盘的。车主认为特斯拉应当负责,而特斯拉则认为是司机驾驶不当。造成车主和特斯拉自主来回扯皮,主要原因还是对特斯拉 Autopilot 没有正确的认识,对它能做什么和不能做什么没有足够的了解。
那时的特斯拉自动驾驶技术其实是驾驶辅助系统,行驶过程中只起辅助作用,大部分操作需要人来完成。根据美国高速公路安全局根据自动化程度对自动驾驶汽车的级别鉴定来看,特斯拉自动驾驶级别只能算 level 2,并非最高级别 level 4 全自动驾驶。量产销售达 L3 级别自动驾驶汽车,比如奥迪 A8 只是在拥堵路段满足相当条件才能激活“拥堵自动驾驶”,这种模式激活后出事故是汽车厂商负责。目前主流厂商目标都是 2020 或 2021 年实现大面积量产商用(当然只是从技术角度,政策法律法规方面还不明朗)。到时候自动驾驶汽车不止是解决拥堵问题,其他场景下开车也会轻松很多。
2. 特斯拉迈向全自动驾驶:软件硬件均不断升级

本文概述特斯拉全自动驾驶(Full SelfDrive),回顾早期的特斯拉 Autopilot(辅助驾驶)。特斯拉的基本面,一是产能爬坡:2017 年 7-9 月的 3 个月,222 辆 Model3 下线;2018 年 6 月最后一周的 7 天,5000 台 Model3 下线;另一是最核心的技术目标:实现全自动驾驶。
来自特斯拉官网
特斯拉车主在选配置时会看到这个选项:全自动驾驶能力¥32,300 元。实际上,特斯拉在不断迭代软件的同时,硬件也在升级。早买早享受,早买早落后。
2.1 Tesla Autopilot 硬件四个阶段
特斯拉的 Autopilot 硬件是实现全自动驾驶的基础。特斯拉的自动驾驶硬件可分为 4 个阶段:
一、Autopilot1.0 硬件时代(2014 年 10 月-2016 年 10 月)
二、Autopilot2.0 硬件时代(2016 年 10 月-2017 年 8 月)
三、Autopilot2.5 硬件时代(2017 年 8 月至今)
四、Autopilot3.0 硬件时代(预计 2019 年发布)
(说明:分类根据官方信息和媒体曝光来划分,与实际车型升级时间可能有所误差)
从硬件来说,AP2.0 才是革命性的,因为特斯拉和 Mobileye 的合作崩了,转而和英伟达合作,并开始承诺“全自动驾驶”。AP2.0 硬件包括:8 个摄像头、1 个毫米波雷达、12 个超声波传感器、一台英伟达 Drive PX2。至于搭载 AP1.0 的车主们,基本告别全自动驾驶了。
2.2 特斯拉主板 3 年升级 3 次
从 AP2.0 到 AP2.5,摄像头、雷达等传感器都没变,处理芯片升级了,用拆解图片来说明:
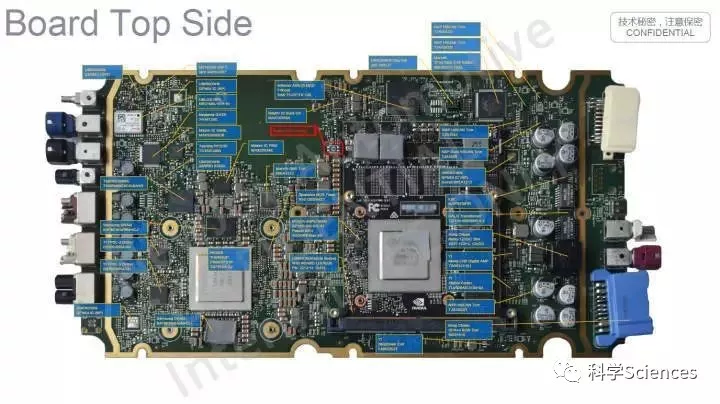
Autopilot2.0 主板正面(图源:新悦智行)
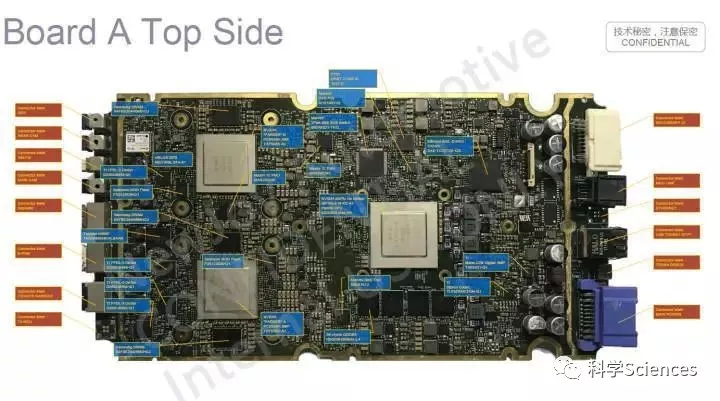
Autopilot2.5 主板正面(图源:新悦智行)
从 AP2.0 到 AP2.5,最大不同在于多了一颗 Parker 芯片,最直观的好处是运算能力更强,也提高了冗余性。(冗余的百度百科解释:冗余指出于系统安全和可靠性等方面的考虑,人为地对一些关键部件或功能进行重复的配置。当系统发生故障时,比如某一设备发生损坏,冗余配置的部件可以作为备援,及时介入并承担故障部件的工作)昨天发布的 AP3.0 硬件是真正的从零开始全新打造,配合特斯拉现在 AI 和神经网络团队打造的神经网络使用,图像处理能力从 AP2.0 时代的 200 帧/秒,上升到了 2000 帧/秒,十倍提升,也完全满足车规冗余和 fail-over 要求。
从 AP1.0 到 AP3.0 经历了 3 年的时间,处理器迭代了 3 次。每次硬件升级,马斯克都明确表示:(Autopilot2.0 及以后的用户)如果实现不了承诺的自动驾驶,可以免费更换主板。(可能和换个电脑主板差不多)要实现全自动驾驶,还得搞明白一个根本问题:到底需要多少算力?现在谁也不知道,取决于你问谁。从 L3-L5,算力 2-20TOPS 都有人说过。
所以特斯拉的逻辑是:不受限于供应商的技术,先让最先进的处理器上车,迭代软件的同时迭代硬件,真正的革命性核心组件自行研发,比如芯片。实在算力不够了,就给用户换主板。
2.3 偷偷升级的电气架构
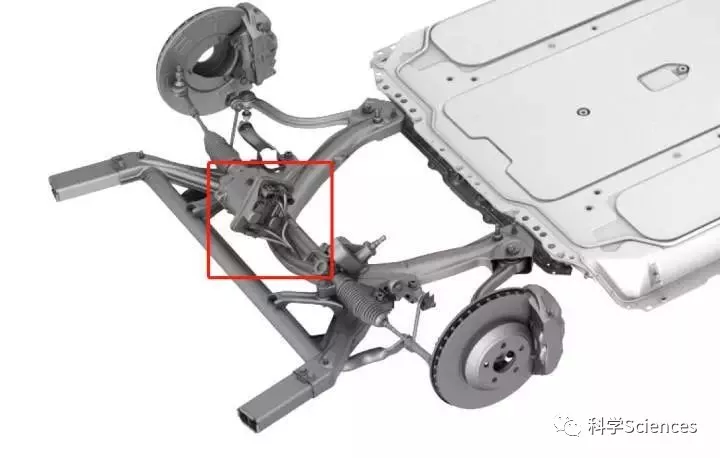
传统汽车,人就是最大的冗余;全自动驾驶汽车,冗余靠车辆本身。那么特斯拉是怎么做的?除了 Autopilot 主板升级之外,其实特斯拉的电气架构也在升级。如果马斯克承诺的「主板免费更换」还能安慰一些车主的话,那电气架构的升级一定会让老车主寒心,总不能把车拆了给你换个转向杆吧?牵一发而动全身,不可能实现。下图是特斯拉 ModelS 转向杆升级为例(图片来自亚马逊卖家)。当然还可能有其他偷偷升级的地方,只是没被发现。

2016 年产 ModelS 转向杆
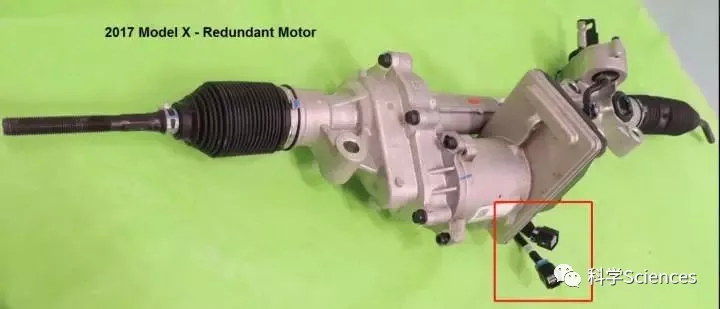
2017 年产 ModelX 注意甩出的两根线

2017 年产 ModelX 注意甩出的两根线
从新转向杆甩出的两根线来看,一定是为了提高冗余性的设计。从插件看,也是冗余的佐证:

双接口
至于 Model3,转向杆零件图片没找到,就从官方出版的手册里扒了一张:
Model3
国外网友反馈 2017 年 8 月 21 日之后生产的 ModelS/X,转向杆都采用了上图中的冗余设计,至少转向电机电源线、连接 CAN 的信号线是冗余的,相应的控制单元可能也是(不确定)。至于 Model3,本身就是特斯拉最新车型,设计之初就考虑了冗余性。这些都证明买特斯拉像买电子产品…
Autopilot 硬件升级、电气架构升级都说明 ModelS/X/3 真的在努力迈向全自动驾驶。但无论怎么升级,特斯拉还会有两个问题:
感知系统(摄像头+雷达)已经定型并且没有升级的迹象,这些传感器很难满足全自动驾驶的需求(业界共识)。
老款、现款车型的电气架构难以出厂后升级,无法满足全自动驾驶的冗余性要求,顶多能做到 L3 级别自动驾驶,和特斯拉承诺的全自动驾驶无缘。
不过根据马斯克的风格来看,即使没有冗余,也会不遗余力的压榨摄像头+雷达的极限,不断给用户新鲜感。在 Q2 财报后的电话会上,马斯克说:下个月特斯拉将会推送 Autopilot v9,功能包含:自动上下匝道(适合高速路)、识别车辆处于哪个车道、自动超车等等。

今天,特斯拉是辅助驾驶体验最好的车。2019 年 4 月初,特斯拉宣布,全新的全自动驾驶(FSD)计算机(之前被称为自动驾驶硬件 3.0)正在生产中。公司明确表示从 3 月 20 日左右开始所有全新 ModelS 和 Model X,从 4 月 12 日以来所有全新 Model3,都配置新型全自动驾驶计算机。马斯克表示,特斯拉将在未来几个月开始为目前购买“全自动驾驶套件”的特斯拉车主提供改装服务。4 月 15 日马斯克推特说,“在 2019 年购买一辆无法升级为完全自驾车的车就像在 1919 年买马而不是买车。”,预热 FSD。
3. AutoPilot 辅助驾驶到 Hardware 全自动驾驶的硬件时代
北京时间 2019 年 4 月 23 日凌晨 2 点,美国时间 22 日下午 2 点,特斯拉本部举行“特斯拉自动驾驶日”TeslaAutonomy Day 活动,并提供网络同步直播。在“完全自动驾驶”发布会,特斯拉第一次展示完全自动驾驶技术,首席执行官伊隆·马斯克和软硬件高管们一起,正式推出特斯拉全自动驾驶产品,包含芯片、硬件,以及软件配套方案。他重申之前对特斯拉硬件的看法:“所有特斯拉汽车现在都拥有自动驾驶所需的一切。您需要做的就是改进软件。”首次公布特斯拉新型全自动驾驶计算机的所有细节,埃隆·马斯克称这款计算机“客观来说是全球最好的芯片”。
马斯克和特斯拉自动驾驶仪硬件主管、优秀芯片架构师皮特·班农 Pete Bannon)详细解释了这台全新的计算机,以及他们最初决定自己生产的原因。马斯克说,他们发现没有专门为神经网络设计的芯片,所以决定自己设计一款,并开发专门针对硬件设计的专用软件。特斯拉表示已经为自动驾驶汽车制造了自己的电脑,并于 2016 年开始从头构建神经网络芯片。特斯拉的神经网络系统从现实世界中的特斯拉车辆中提取图像和视频,并通过计算和预测行为等组合,学习如何高效准确地识别道路信息。并且每部汽车电脑都有备用解决方案,因此如果一个芯片发生故障,第二个芯片就可以接管。马斯克发布会上表示:“从未设计过芯片的特斯拉,设计了世界上最好的芯片。”
马斯克发言也没少了 diss 业内标准和同行。这次炮火主要集中在激光雷达,钢铁侠说:任何使用激光雷达方案的人都是大傻 X,注定失败(doomed)。总之,全世界最先进的自动驾驶计算机实现全自动驾驶能力。特斯拉还将开启 RoboTaxi,在 2020 年上路运行超百万辆完全自动驾驶车型出租车。马斯克承诺特斯拉斯 2019 年底前推出完全自动驾驶车,最快 2020 年让大家上街打到无人驾驶的电动特斯拉。同时,在两年内制造没有方向盘的汽车或电动滑板车。以下是完整详情,分成 8 小节图文。
3.1 全自动驾驶硬件 Hardware 3.0√
首先跟马斯克登台的是自动驾驶工程副总裁 Pete Bannon 伊隆·马斯克和软硬件高管们一起,正式推出特斯拉全自动驾驶产品,包含芯片、硬件,以及软件配套方案。)。
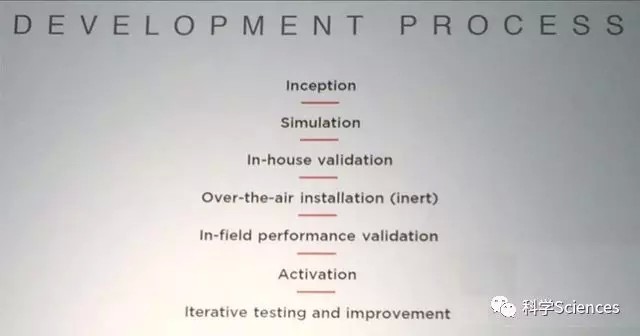
高管皮特·班农 Pete Bannon) 2016 年从苹果加盟,他上台给出全自动驾驶硬件的开发时间表,并表示去年 12 月就开始进入改装车。接下来就是产品亮相时刻。
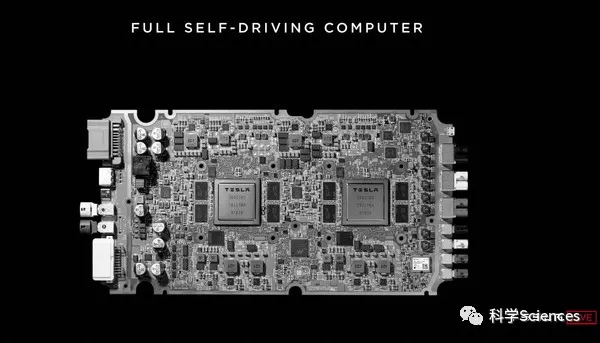
神经网络芯片为主的特斯拉全自动驾驶(FSD)计算机
特斯拉把这个全自动驾驶的硬件称为 Hardware 3.0,结构如上。每套 HW3.0 含 2 套 FSD 硬件,未来会嵌入手套箱的顶部。整体性能方面,达到了 144TOPS(处理器运算能力单位 Tera Operations Per Second),秒杀英伟达 DriveXavier 理论性能值 21TOPS,马斯克说:7 倍。而 HW3.0 核心硬件是 FSD。
采用 14 纳米 FinFETCMOS 工艺制造,尺寸为 260 毫米,具有 60 亿个晶体管和 2.5 亿个逻辑门,能够处理高达每秒 2.5 千兆像素和 36.8TOPS。存储是 LPDDR4RAM 模块,具有 68GB/s 的峰值带宽,其图像信号处理器具有 24 位流水线并支持高级色调映射和高级降噪——每个都可以以高达每秒 1G 的速度执行操作。体积不大,但能力强大。
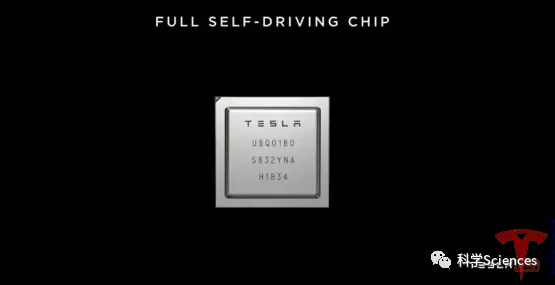
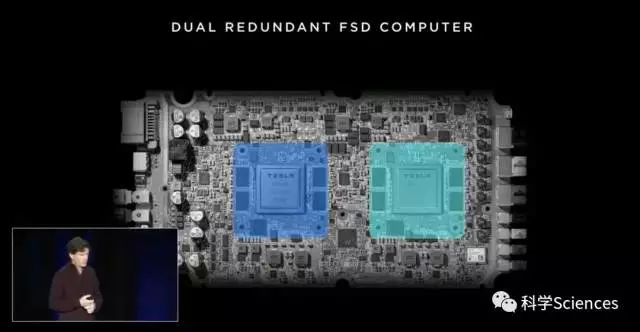
FSD 采取双神经网络处理器冗余模式,都是 2GHz,32MB 的 SRAM 内存和 96×96 多个并添加阵列,每秒可处理高达 1TB 的数据并执行 36TOPS(总共 72TOPS)。双处理器独立运算,一个处理器挂掉另一个还能继续工作,实现了工业级硬件冗余设计。
另外,还有 2.2GHz 的十几个 ARMA72 64 位 CPU,性能是当前解决方案的 2.5 倍。
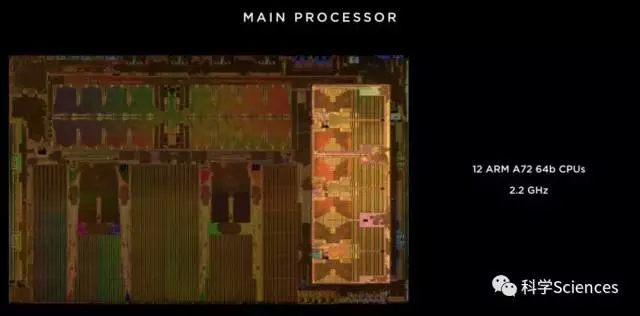
32 位和 64 位浮点运算的 GPU。

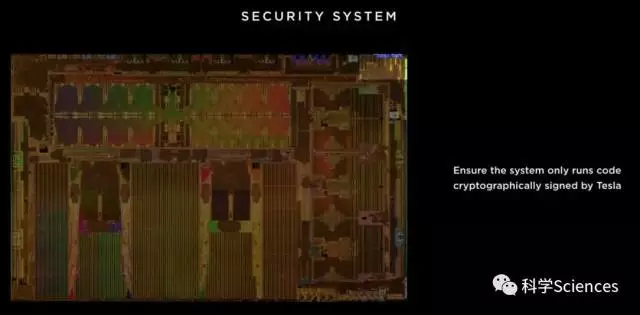
FSD 有专门独立的安全模块进行护航,只运行特斯拉加密软件,不支持非特斯拉软件。
FSD 每英里功耗约为 250 瓦(很大了),马斯克说老黄家 Xavier 功耗是 FSD 的 7 倍(这得费多少电啊!),成本也是 7 倍,但 FSD 的神经网络加速性能,却是 Xavier 的 7 倍。
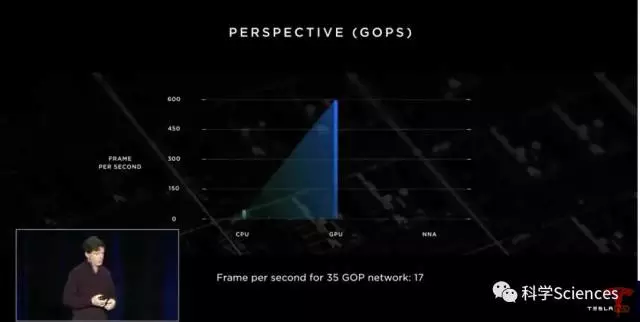
特斯拉新芯片的神经网络处理器,可以处理汽车 8 个不断运行的摄像头每秒 2100 帧的输入图像,这相当于每秒 25 亿像素。峰值方面,皮特表示每秒 50 万亿次运算是 HW3.0 的目标性能。神经网络处理器 IP 完全特斯拉自主,由三星德州工厂生产代工。特斯拉大约一个月前,就开始把 ModelS 和 X 的自动驾驶从英伟达的 Drive 平台切换到自研芯片,大约 10 天后 Model3 也加入了该序列。
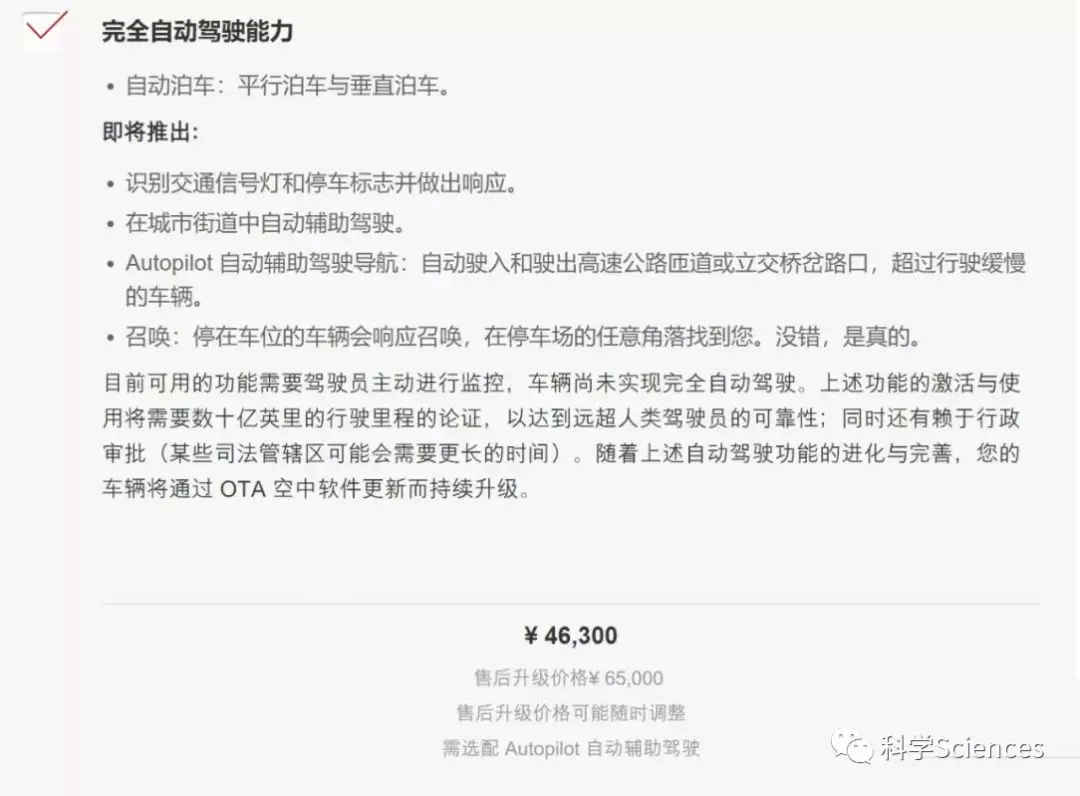
马斯克掩骄傲地说:这听起来不太可能,因为特斯拉从没有设计过芯片,怎么一下子就能搞出全世界最好的芯片呢?但它就这样发生了。他说,现在特斯拉有了自动驾驶必须的硬件,接下来要做的就是不断改进软件。还说下一代芯片还会更好,而且已经在研发设计中,会比现在提升 3 倍,目标是 2 年后完成。现在他们的自动驾驶芯片,领先业界 2 年。最后,FSD 大概会在明年第二季度完全就绪,目前中国能力和售价如下(包含 AutoPilot 后价格或至 74100 元):
3.2 软件:虚拟仿真不可取
登台讲解全自动驾驶软件的是特斯拉人工智能高级主管 Andrej Karpathy。
主持人先是列了 Andrej 一长串 title,包括斯坦福博士之类的。但马斯克打断说,斯坦福遍地都是博士,但是 Andrej 可能是全世界最优秀的计算机视觉专家。
Andrej 说他的工作主要是为特斯拉训练神经网络,而且面对的挑战是实时生成的海量细节数据。但 Andrej 强调,在特斯拉,他们认为物理数据无法替代。可能依赖虚拟仿真是自动驾驶目前常态,但特斯拉更信赖现实物理数据。

Andrej 展示了特斯拉模拟与现实世界道路数据的比较,表示即便虚拟仿真越来越厉害,但现实世界总能不断给你不同的、意料之外的交互数据,这对自动驾驶软件系统迭代至关重要。马斯克还现场补充说,使用模拟器,就像自己改自己的作业,实际提升有限。真正展现的实力的,该是创建一个实际环境的模拟器——当然,这就是特斯拉所谓的阴影测试模式。
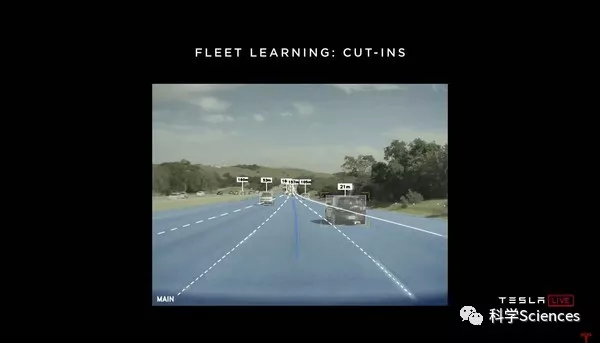
Andrej 介绍说,现在特斯拉预测变道的能力越来越强,已经记录了 900 万次成功换道,就是影子测试不断训练神经网络后的效果。最后,Andrej 也强怼了一发激光雷达方案:我们人类开车,都是完全视觉驱动,为啥到机器就非激光雷达不可了呢?
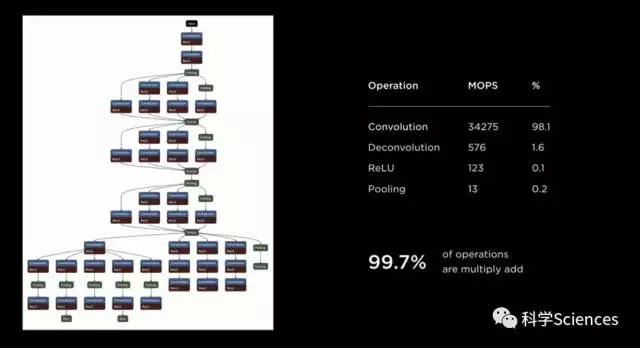
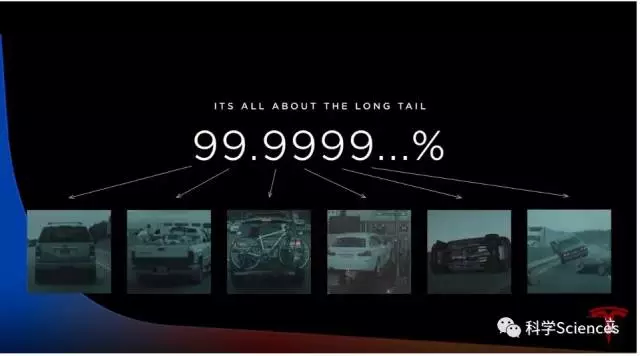
Andrej 认为激光雷达是条捷径,但回避了对自动驾驶至关重要的视觉识别的基本问题,它会给人一种进步的错觉,但没有解决本质问题。现在特斯拉全视觉感知方案,已经能处理 99.999%的场景。
3.3 测试:阴影测试成效显著
接着,特斯拉工程副总裁 StuartBowers 上台,主讲特斯拉自动驾驶测试计划。
他描述了特斯拉全自动驾驶计算机的开发周期,以及它是如何与特斯拉的神经网络完美融合的。集中介绍了“自动变道”功能。这一功能,完全得益于“阴影模式”的测试方法。
当“感觉良好”时,这个功能就会发送给成千上万的用户。使用这项新功能的人越多,特斯拉就会越熟悉这个流程,也就会越熟练。当特斯拉对这一功能充满信心时,将会全面铺开。特斯拉每天都会发生 10 万起车道变更,而且没有发生任何交通事故。

3.4 特斯拉 FSD AI 计算机性能指标
特斯拉训练其神经网络系统
特斯拉通过与现实世界互动来训练其神经网络系统,进一步了解汽车将改变车道时的运动状态,从而实现自动驾驶。为了测试系统,特斯拉开发了“阴影模式”。汽车看到一辆即将改变车道的车辆,并记下它将要做的事情。数据被发送到特斯拉,它会查找误报或不正确的决定并重新训练系统。

特斯拉声称这些是已经实现的结果,与上一代由英伟达(Nvidia)硬件驱动的特斯拉自动驾驶仪(TeslaAutopilot)硬件相比,新硬件的每秒处理帧数提高了 21 倍。如下视频截图。
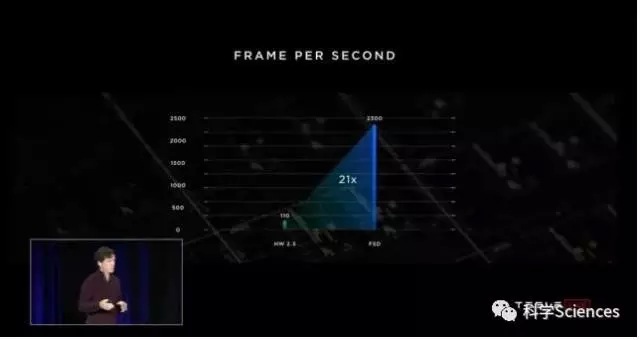
班农曾在苹果公司负责重要的芯片项目,他说,他从未参与过一个改进因数超过 3(倍)的项目。
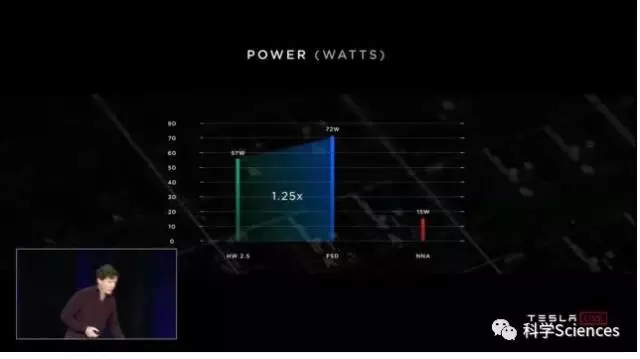
班农工程师解释了电源问题,虽然该设备功耗有所增加(25%),但这与其性能的提高幅度相比不值一提。班农说,每辆车的硬件成本比 Autopilot2.5 低 20%左右,差额将用于开发新的硬件。马斯克补充说,三星正在德克萨斯州奥斯汀生产特斯拉设计的新芯片,他预计供应不会有任何问题。
首席执行官马斯克补充说,他们已经在研究下一代芯片,并预计它将比目前刚刚投产的芯片性能强 3 倍。他预计下一代芯片(的发布将在)大约两年后。不过,班农的演讲关注的是当前一代全自动驾驶计算机。此前 Musk 透露,特斯拉计划允许特斯拉驾驶者让 Autopilot 在道路上变得更激进,即使这样做会增加事故风险。这个设置在理论上听起来非常不错,但分析师们指出,这还得取决于道路上的其他人类驾驶员。随着特斯拉对其算法越来越有信心,这家公司在 Autopilot 也变得更具雄心。马斯克指出:“在更为激进的交通模式下,发生小车祸的可能性很小。”这位 CEO 称其为疯狂的 Mad MaxPlus(疯狂的麦克斯+)模式。
4. 特斯拉出租车路线图等计划
4.1 马斯克重申 RoboTaxi 蓝图
最后,终于轮到马斯克分享,他再次展现风格:想得大,也要干得大。(只是这一次有点底气不足,看起来状态不是很高昂)
核心是践行:电动化——自动化——共享化路线。他实际重申了特斯拉总体规划。
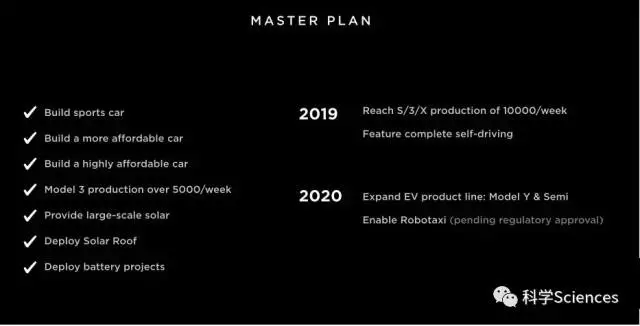
马斯克说,最快 2020 年(明年),特斯拉就会推出 Robotaxi(无人驾驶出租车)服务,通过无线软件升级激活电动汽车的自动驾驶拼车网络,特斯拉车主可以将自己的汽车加入到这项服务中。车主可以选择只把自己的车共享给朋友、同事或社交媒体上的好友,同时他们还可以在特定时间限制 Tesla Network 的可用性。通过 Robotaxi 的 Ride-Sharing App,特斯拉车主可以将自己的汽车加入共享车队来赚钱,或者叫一辆自动驾驶的特斯拉汽车来接他们,并把他们带到目的地。

特斯拉将在今年底前开发出实现全自动驾驶系统所需的所有功能的软件。他们最快将在 2020 年打造出一个自动驾驶出租车服务,届时,它将把公司的电动汽车加入到共享汽车 Tesla Network 车队中。他强调,这个版本系统仍然需要驾驶员的注意力,这(最初)并不能真正让它成为自动驾驶,预计 2020 年第二季度,它将不再需要驾驶员的注意力。
他还开玩笑表示,虽然他通常不能准时,但特斯拉团队总能提前完成任务。未来,Model S 和 Model 3 系列都会作为 RoboTaxi 用车。为了配合这一规划,还会进一步变革电池组,把使用寿命从目前的 300-500,000 英里提升到 100 万英里,实现最低的维护费用。
当前看来,该服务将面临的最大问题之一不是硬件、软件,而是监管。Robotaxi 服务不会在所有地区推出。马斯克表示:“并不是所有的司法管辖区(都支持该服务),因为我们不会在所有地方都得到批准,但我有信心会在某些地方得到监管部门的批准。”
马斯克等人士认为,方向盘和踏板等手动控制装置将在未来被完全移除。不过在此之前,现有汽车都将采用传统的控制方式。马斯克称:“我认为将会有一个过渡时期。一旦监管机构对移除方向盘的计划放心,那么我们就会把它移除。”此外,如果一辆汽车发生事故,那么特斯拉 Robotaxi 车队将需要担负的责任有多大依然是个问题。
估计到明年底,特斯拉将拥有超过 100 万辆这样的汽车上路行驶——大约在它们开始激活完全自动驾驶能力的时候。马斯克说:“Robotaxi 将在很长一段时间内保持极高的需求,”它也将从电动汽车中获得更多的回报。这些电动汽车的基本效用将提高五倍。按照目前的数字,驾驶一辆 Robotaxi 每英里的成本可能还不到 0.18 美元。而 Uber 和 Lyft 的拼车服务的平均拥有成本为每英里 1-2 美元。因此,Tesla Network Robotaxi 每年潜在的毛利润约为 3 万美元。他估计,当这些汽车完全自动驾驶时,作为自动驾驶网络的一部分,它们的价值约为 20 万美元。考虑到特斯拉销售这些汽车的起价低于 5 万美元。消费者在购买特斯拉以外的任何汽车时,都应该认真考虑自动驾驶。
4.2 火力全开 diss 激光雷达
发布会最大亮点,还属马斯克对激光雷达方案的全面 diss。活动开始没多久,马斯克炮火精准,火力全开。目前大多数其他汽车制造商正在使用或计划使用 LiDAR(激光雷达)作为其驾驶员辅助功能。但马斯克在会上表示:“LiDAR 是一个傻瓜的差事。任何依赖 LiDAR 的人都注定要失败。它很愚蠢,它既昂贵又不必要。”昂贵的传感器是不必要的。这就像是一大堆昂贵的附属品。他还用阑尾进行了比喻,一个阑尾不好——那么,一大堆阑尾怎么样?这太荒谬了。你们会明白的。
发布会后面环节中,马斯克再度重申了自己的态度,我们要抛弃激光雷达,记住我的话,这就是我的态度。但马斯克也不是完全不认可激光雷达。在谈到 SpaceX 公司使用激光雷达时,他说这是有意义的。只是把激光雷达用在汽车上是“愚蠢的”。发布会结束的时候,马斯克还不忘再次 diss:
虚假和愚蠢=高精地图和激光雷达
False andfoolish = HD maps and LiDAR
如此疯狂“批斗”激光雷达,引起很多人不满。网友评论:
激光雷达:有一个大箱子在路上,停车。
特斯拉的视觉:路上有一辆消防车,我们就要撞上了。
也有人在 Hacker News 上现身说法,直击特斯拉视觉系统痛点:几周前芝加哥下雪了,我的 AutoPilot 关闭了,因为大雪遮住了摄像头。所以我不会买这些“没有激光雷达的自动驾驶”的东西。
总之,马斯克台上 diss,网友网上反击,又吵起来了。
现场倒没啥争论,此次参会者多是特斯拉股东,他们现场都领到了测试体验的名额。

刚发布的特斯拉全自动驾驶,他们有幸可以当一把小白鼠。God bless 特斯拉车主和股东~
4.3 OMT:英伟达回怼
特斯拉发布会结束后,英伟达发言人发表声明:特斯拉将其全自动驾驶计算机的处理能力与英伟达 Drive Xavier 的处理能力进行了不准确的比较。正确的比较应该是与英伟达的全自动驾驶计算机 Nvidia Drive AGX Pegasus 进行比较,后者提供 320TOPS 用于 AI 感知、定位和路径规划。
声明中还指出,Xavier 提供了 30TOPS 的处理能力,但特斯拉错误地说:它只提供 21TOPS。此外,使用单个 Xavier 处理器的系统,是为辅助驾驶自动驾驶而设计的,而不是全自动驾驶。
资本市场也不买账。特斯拉“全自动驾驶”发布会结束,股价下跌 3.85%。而且有意思的是,YouTube 的直播视频已不接受回放。更诡异的是,官网预订页也一度遭遇意外,竟然 404 了。

参考文献(1500 字)
tesla. models. [EB/OL], tesla,https://www.tesla.cn/models, visiting date: 2019-04-23.
electrek. Tesla has released new self-driving demovideo based on its latest software working on its new Full Self-Driving (FSD)computer. [EB/OL], electrek, https://electrek.co/, visiting date: 2019-04-23.
时间的朋友. 自动驾驶现状及级别、技术路线. [EB/OL], cnblogs, https://www.cnblogs.com/doit8791/p/7637727.html ,visiting date: 2019-04-23.
雷锋网新智驾. 这次狼真的来了?特斯拉 2020 年要实现真正的自动驾驶. [EB/OL], baijiahao,https://baijiahao.baidu.com/s?id=1626336669080086725, 2019-02-24 16:05,visiting date: 2019-04-23.
腾讯科技天宝. 特斯拉为实现全自动驾驶收集 20 亿公里 Autopilot 数据. [EB/OL], diankeji, http://www.diankeji.com/car/28873.html, 2018-11-16 10:46, visiting date: 2019-04-23.
原作者微博 ID:@我只是个偶像派记者. 特斯拉迈向全自动驾驶:软件不断升级,硬件也在偷偷升级. [EB/OL], baidubaike, http://www.sohu.com/a/245102650_120865, 2018-08-03 22:57:24, visiting date: 2019-04-23.
来源:手机中国 CNMO. 马斯克:升级吧特斯拉拥有自动驾驶需要的一切硬件.[EB/OL], sohu. http://tech.ifeng.com/a/20190423/45563422_0.shtml, 2019-04-23 07:42:04, visiting date: 2019-04-23.
腾讯汽车天宝 imdb. 特斯拉推出全新全自动驾驶计算机号称“全球最好芯片”. [EB/OL], qq. http://auto.qq.com/a/20190423/003614.htm, 2019-04-23 11:58, visiting date: 2019-04-23.
imdb. Elon Musk. [EB/OL], imdb.https://www.imdb.com/name/nm1907769/?ref_=fn_al_nm_1, visiting date:2019-04-23.
最近更新:w_ou(2019-03-27). 埃隆·马斯克. [EB/OL], sohu. https://baike.baidu.com/item/埃隆·马斯克, 2019-03-27, visiting date: 2019-04-23.
x. 秦陇纪. 西方哲学与人工智能、计算机; 数据科学与大数据技术专业概论; 人工智能研究现状及教育应用; 信息社会的数据资源概论; 纯文本数据溯源与简化; 大数据简化技术体系. [EB/OL], 数据简化 DataSimp(微信公众号), http://www.datasimp.org, 2017-06-06.
此文出自:©科学 Sciences,作者:秦陇纪,时间:20190423Tue©秦陇纪 2010-2019 汇译编。

腾讯云云原生提质增效实践精选集 2024
《2024腾讯云云原生提质增效实践精选集》出炉,5大热门技术领域,13个行业精选标杆案例,痛点到解决方案全...












评论