编者按:1/15-1/17 日在 751 北京时尚设计广场 79 罐举办了有胆、有趣的极客公园创新大会,本文就是根据大会上 MIT 计算机科学与人工智能实验室主任 Daniela Rus 的演讲内容整理而成。
我是极客,我觉得极客是非常酷的一件事情,因为极客知道如何编程,如何创造。我的成长环境中经常会看发射台,我自己也想成为冒险故事当中的一员,比如像历险记和科幻小说的机器人,最近《星球大战》中这些可爱的机器人是我的最爱,因为它们是可以跟环境产生感知的,非常有意思的是它们可以做出智能的决定。
但是现实当中的机器人并非如此,机器人发展从 1921 年就开始了,它代表着重复生硬的劳动。当时大家觉得机器人可能会抢夺人的工作,但是也有很多人觉得很激动,比如他认为我们 5 年之后开车时可以睡觉,因为机器人会替你开车,因此它背后有很多梦想和很多疯狂的想法。很多人认为我们打造的是极限的机器人,它够聪明、够具有服从性,但是我们要回到头开始讲,从人类发展的历史开始,从技术的源头。你看远古的科技文物,看到瑞士的自动书写人偶,看在 30 年代到 40 年代可以当作乐器使用的机器人,一直到科幻小说中的机器人,还有现实中负责打扫的家庭机器人,这些机器人真是贴近生活。人类发展历史中梦想生产出这样的机器人,而现在这样的机器人正深深影响我们的工作和生活,比如手术当中可以使用手术机器人,还有一些机器人进行远程探索,比如火星的探索,让我们世界和生活更美好。
机器它有一定的属性 ,比如它是否做出自我决定要取决于它智能的程度,而且它要进行编程。为了让你的机器人有这样的能力,我们首先要有实体的机器或者实体的硬件,它可以使用传感器或者执行器,打造出一个机器人的形象,它可以根据实际外部条件做出理智的决定。那么这个机器人是可以编程的,同时,它一定要跟物理的社会产生互动。有的时候一个机器它不动,也不跟你说话,只是通过声音来控制,这也不是我们概念上的机器人。
到底什么叫机器人?
机器人它的形态是各异的,同时做的事情也是非常丰富的。可能大家以前遇到过一些机器人的形象。为了能够有一个有效的机器人,必须有一个外形,同时它能够完成任务所需要的外部形态,在这种形态之外它还要有一个大脑,这个大脑可以控制它的外部形态执行人类赋予的不同任务。机器人在生活当中要有完成任务的能力,同时还可以控制自己的外形,非常好的平衡大脑和它的身体。
我简单跟大家分享一个在亚洲执行的项目,是在新加坡做的无人驾驶,这些机器人是负责控制这些车的,在汽车后面不需要人的控制,是一种无人驾驶的情况。以前有共享自行车的概念,因为有的时候大家都去一个地方,所以有些地点自行车没有了,有些地点自行车又太多,所以必须要请负责调配自行车的工作人员,把自行车多的调到自行车少的地方去,不一定是人负责这个事情,它可以换成机器人,这是我们在新加坡所做的事情,希望推动无人驾驶技术,背后的理念是你告诉这个系统、告诉这个机器人“我想到极客公园,从我的宾馆到极客公园”,所以机器人把你带到这个地方,你直接下车就好了。同时它可以告诉这个系统中其他的人,就是你自己不用去开、不用去控制,它可以自己进行调解,我想这就是未来无人驾驶一个非常好的控制和智能系统。
接下来我们再看一下这个机器人大脑和身体的组成,有一个像高尔夫车的机器人,它有几个传感器,加上激光雷达,还有信息板、相机、头顶监测器,很好地监测这个环境中道路的障碍。有这样的外形之后我们要进行一个算法,它可以控制这个车的外形,它应该怎么做、开到哪里,这是自动驾驶的,同时它不会撞到任何路的障碍上,它可以按照你设定的路线走,同时它可以在路上告诉你它的位置在哪,有这种地图感知感的能力,是非常智能化的机器人。同时,这个机器人可以自动避开路上的行人和障碍物,机器人可以使用它的这些能力避免潜在的障碍。同时这个机器人可以跟其他的车进行互动,随时可以停下来,比如拐角处有车开出来,机器人可以等车过去再继续走,还可以做更多的事情。
人们使用机器人时的感受
谈到这些机器人,我们所感兴趣的是了解一下人们在使用机器人时候是否很享受,大概一年前我们把我们的一些机器人放到了新加坡的一个地方,在这里我们识别了 5 个公园里的位置,让人们去体验。人们可以预定一个机器人自动驾驶回家,机器人把他们带到相应的目的地,同时机器人知道有哪些人在排队。在中国的公园里面有类似的环境,大家可以看到所有的路线,有 500 多人预定了机器人送他们回家的实验。
机器人的通用模块:机器人细胞
如果大家考虑一下自己,我们自己生产时耗很多时间制作一个机器人,还有机器语言编程也耗费非常多时间。我们如何改进?如何使用新的技术进行创新,来加速我们制作机器人的过程?其中一个想法我非常感兴趣,就是创建一种通用式的模块,使用这样一种通用的模块做任何的机器人。如果我们实现这一点的话可以做很多酷的事情,比如实现自动化的操作,实现一些创新式的开关门的方法。16 年前我就有这样的想法,今天我们还做不到很多动作,但是我们可以从愿景当中获得灵感。

这是我们所做的工作,我们一直在开发非常小的细胞,它可以成为一种通用的模块。这个机器人有魔幻般的一些元件,这个机器人内部有个轮子转得非常快,当我们阻止它转的时候会发动一个势能,然后这个机器人就可以跳跃。

大家看看这个机理,在内部的轮轴可以让它去到任何一个方向,可以让它向前跳跃,也可以让它转向,可以选择不同的方向,这是非常魔幻般的机器人,它可以非常好的协作,它们可以一起来运动,实现结构上的变化。我们只要在一侧来改变一个模块就可以实现它的变化,机器人有运动的能力,可以让它搭建一个桥梁,还可以做其他的事情,可以进行很大范围的跳跃、跨越,还可以做很多新的尝试。
非常大的挑战是它在侧面是 5 厘米,我们可能会问:“怎么让它小一点呢?”
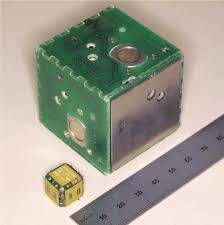
这是我们做小的程度,我们把它升级为小型机器人,在尺寸方面是 1 厘米 ,它可以小到这样,里面还有更小的元件,有棕色的元件,有磁铁。它可以用来进行编程,用来进行通讯,用来传递力量,它是非常小的半毫米的元件。我们可以看看这个立方体,相对人的手来说它是多么的小!这样的立方体可以进行通信、联络,我们给机器人发出指令。比如一个新的物体,在这里有很多材料,我们要把它做成这样一个机器人的话需要很多立方体组合在一起,看看哪个应该放里边,哪个应该放在外面,我们有非常完好的连接部件,它可以组成不同的形状。
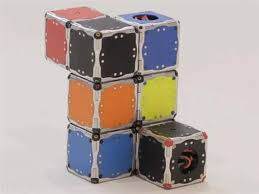
大家想一下,就像这个智能的物体一样,你把它组合到一起,从零散的部分可以组合成一个智慧的东西,所有的组合能够给我们带来更多的功能。
有什么方法可以容易地进行形状的编程、可以做更新的东西?想象一下捞沙子,在一个装满沙子的容器里放进一个材料,捞出来后沙子粘在材料上和材料有同样的形状。我们第一步要做的就是一粒粒的沙子组合,然后我们需要组建大脑、需要一些算法,在这些智能的颗粒之间进行组合,希望一旦形成一种形状的话就能创造另外一个可视化的物体,这就表明什么样的算法能够给你带来什么样的结果以及什么样物体的形状。我们可以用一些参数,我们可以实现扩模,可以形成不同的尺寸。
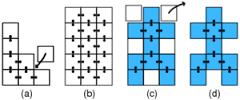
这是我们机器人的一个复制品,是我们所制造出来的,我们跟踪追溯了原来的形状,能不能把它做成真的呢?同样的算法通过模拟的话,通过几秒钟的时间你就可以看到一个非常具有魔幻般的机器人的形状。可以复制非常简单的形状。当我们加入新的元件时候它们可以形成通讯,在这个中间体周围形成一个连环。通过使用这样的技术,大家可以想象一下,在将来 3D 打印、3D 制作可以推向更高的智能化水平。
这是最终的形状,光在闪烁,很快我们可以看到颗粒之间的联系,可以对我们想要制作的物体形成新的形状。
我一直想了解如何快速制造定制的机器人,我们要问的是能不能有一个全新的泛式,完全不同于传统的机器人,并且很快的制作出这样一个定制的机器人。比如爱丽丝有一只猫,爱丽丝希望有一个机器人跟她的猫进行互动,这个机器人内置有一些接口,可以选择尺寸,一个小时之后她可以获得一个机器人,当然要求是能够编程为和她的猫进行互动的机器人。假设我希望有这样一个机器人跟我下象棋,有三步要走,你要进行规格的设置,要有许多机械的元件,要确定行为,要组装部件,最后才能成功,机器人才能跟你下棋。这里的机器人制作大概花了 2 个小时和 10 美元部件,很多步骤是自动化完成的,但是有些是手工完成的,如果有正确设计的话完全可以在 2 小时之内制作一个机器人。
比如你有一个用户,不管是爱丽丝还是谁,他希望有个新的昆虫形状的机器人,系统要能够搜索数据库,看看这个数据库里面有哪些电子元件能实现机器人设计的要求,然后进行识别找出元件,编程的配置非常适当,能够适于 3D 打印和相应的功能,这就实现了你要的机器人。想象一下有各种各样不同的机器人,我们有个数据库,它里面有很多机器人元件,如果你希望制作个昆虫式的机器人,我们希望有一双腿,我们希望它的身体、大脑、传感器都配置非常良好,通过扫描数据库我们可以看到元件参数和这些元件的尺寸,然后我们进行组装,把这些部件整合起来,形成最终的物体。然后编程设计、剪刀裁减调整,确定机器人身体的情况和使用什么样的技术,有些是需要手工完成的,所有这些进行得非常快,如果你用这种方法 2 个小时就完全可以做一个机器人。
折纸式机器人
我们一直想了解我们到底能够做什么样的加速,以及加速的程度,然后我们想到了折纸式机器人。想想你看到一个机器人在火炉上进行烘焙,这是多大的魔力?我们必须有三层结构,上面是结构式的,中间一层我们有一种特殊的材料,它遇热的时候可以收缩,这是一种典型的玩具式的中间层,通过把这些缺口和缝隙进行调解的话就可以实现不同形状的机器人了。
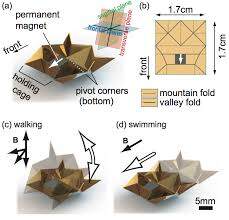
我们看看这些工艺,看看这些图片,从这些图片可以看到自然而然的创造一些不同的种类、形状,可以通过折纸的做法实现你要的形状,然后让这个机器人遇热,然后平面的这张纸会变成 3D 空间的物体。在这里有一种机器人可以利用这样的系统,这叫折纸式的机器人,它完全可以变成立体的站起来就走了,你可以控制它,你可以让它任何环境进行运动,它可以游泳,它可以行走,它在一秒内可以走很远,它也可以携带一些物体进行运动。

我们控制的方法是这样的,在一个具有强烈磁性的环境下进行编程,可以在上面加上一些线圈,让它具有选择性功能。
一旦我们有这样设计的话,可以让机器人进行循环、回收,也就是说让它再变回去。用这种方法我们可以打印各种各样的机器人,有昆虫式的、腿式的、蟑螂式的六脚机器人等等。如果我们能够制造如此多种的机器人,我们就能够做到整个世界都可以接触机器人,机器人可以帮助很多方面,能够改变我们的生活、游戏和工作。
机器人的未来使用场景
将来,你的购物有可能是这种场景,早上起来让你的机器人帮你把东西拿出来,比如拿些新鲜的面包做你的早餐。或者你们想去商店也行,你的爸爸妈妈、祖父祖母可以开无人驾驶汽车去。所以未来的世界将会由机器人所占据了,可以看到有些机器人会帮助你直接到货架上取你要的商品,有些负责物流配送。汽车它自己开到超市的门口,把你想要的产品直接拉回来。你要做的事情就是告诉它们你要买什么样的产品、它的新鲜程度、它的价格或者它里面的营养价值。如果是残障人士的话,这些车还会避让你。

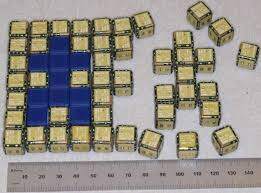
你们能猜一下这张图片中有多少机器人的存在吗?共有 19 台机器人,你可以把 19 个机器人都找到吗?这是一个未来非常有可能发生的机器人的工作场景。如果我们能够让机器人的大脑更加具有能力、更加具有创造力,我们就能够让更多人完成很多不同的任务,然后让这个世界变得更加美好,同时让我们的生活也更加的美好。
发展机器人的问题
有很多问题都是在这个过程当中不断的体现,尤其当整个世界在发生变化的时候。我们问:是否要管制?要从哪一个层面开始管制?我们如何把机器人的安全进行测试?安全的标准是什么?谁来负责任?比如像这个自动驾驶的汽车出现了车祸,或者无人机在发货的时候突然发现放错了地方,谁负责?到底是制造厂家的问题?还是编程人员的问题?还是控制机器人的人的问题?到底谁来负责?这个问题非常重要,这要政策制定者和行业领导者来解决。
政策制定与实施现在什么样?美国每个州都是独立思考对无人驾驶汽车的规范,每个国家都是彼此独立的,但如果有非常混合的政策在一起的话应该怎么办?我想,大家应该统一思路来使用这种机器人。
最后还有个很大的问题,就是政策制定者是否要鼓励机器人的创新,同时鼓励使用机器人?比如有些无人驾驶车有能力在高速公路上跑,那要不要鼓励这种车上高速跑?这个问题我们现在还没有答案,我们希望未来世界的机器人更加丰富。
机器人并不是疯狂的理念或者疯狂的不现实,因为实际在九十年代的时候 Mark Weiser 就已经有这样的梦想:每个人都能随时随地地使用一台计算机。现在世界确实是这样,每个人都有这样的计算能力,这已经成为我们生活当中的一部分,每个人都知道如何使用计算机。而且他说:”最深奥的技术是那些我们感觉不到存在的技术,这些技术融入到我们生活中,不知不觉成为我们生活的一部分”。这样的话在九十年代被说出来,现在已经实现了。那接下来的预言就是机器人的预言,机器人也会不知不觉融入到我们生活当中,让我们的生活更加舒适。
今天我们有这样的优先权,因为我们做的一切都很重要,而且我们所做的一切都能产生重大的影响。每个计算能力都有个 APP,如果你要做一个事情,到 APPstore 中有现成的编码直接下载下来,你想用的一切都可以非常顺手的开启。接下来在机器人这个层面就像在 APPstore 当中,我们使用机器的想法是完成实际的物理的任务,这个意义非常深远,如果我们可以让每个人都有一个机器人(可以让它做实际的体力活),我们就可以做这么多种类型的机器人,极客非常喜欢这样的想法不是吗,谢谢!
演讲者简介:(Daniel Rus)丹妮拉·鲁斯, 麻省理工大学电子工程和计算机科学教授兼计算机科学和人工智能实验室(CSAIL)主任, 是首位担任 CSAIL(包括其前身 AI 实验室和计算机科学实验室)主任的女性。同时她是美国自然科学基金委杰出青年研究员和艾尔佛斯隆基金研究员,2002 年麦克阿瑟奖研究员和 AAAI 和 IEEE 研究员。研究领域包括分布式机器人、移动计算和可编程物质。她的研究团队分布式机器人实验室已经开发出模块化自重构机器人、自组织机器人系统、机器人网络和首个响应器的传感器、移动传感器网络、合作式地下机器人技术和桌面机器人的新技术。他们已经建造出能够修剪花园、从头烘焙饼干、切生日蛋糕、无需人工帮助成群飞行以执行监督功能并与人类跳舞的机器人。




