

在QCon上海2018大会上,李海泉讲师做了《自动驾驶系统微服务化架构实践》主题演讲,主要内容如下。
演讲简介:
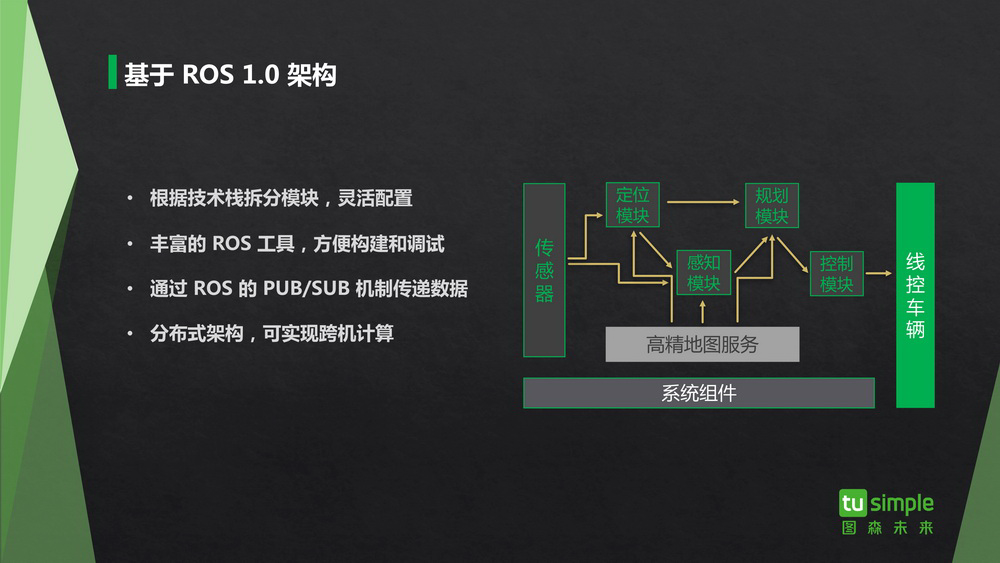
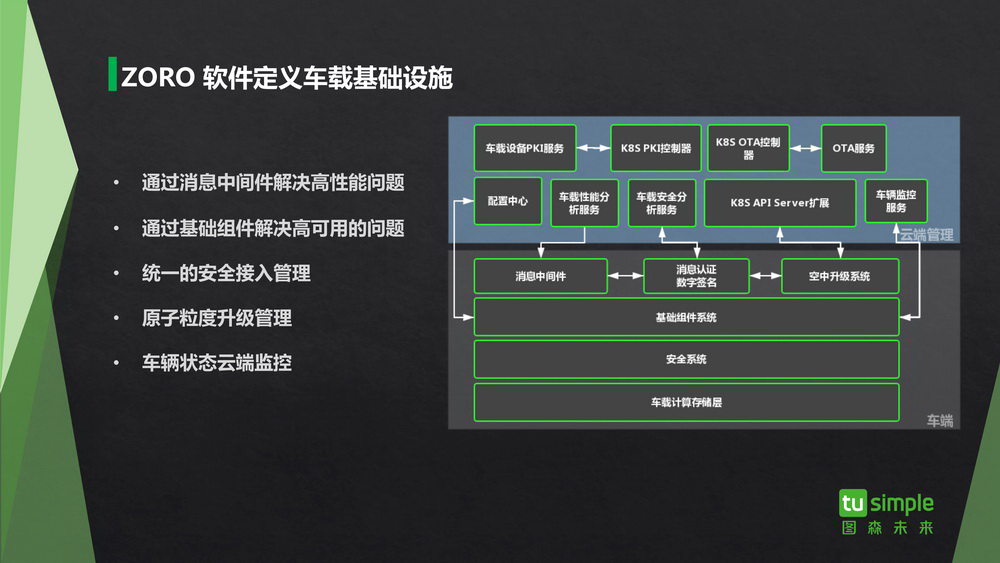
无人驾驶系统集成了多个软件模块(包括感知、定位、规划控制等)和多个硬件模块(包括计算、控制、传感器模块等),如何有效调配软硬件资源实现高性能计算;如何保证多种传感器运行时不断产生的数据和算法模块实时计算的结果在系统中快速、高效传输;如何设计功能模块间资源隔离,保证系统稳定运行;如何能够保证整个系统快速迭代,这些都是自动驾驶系统面临的挑战。
听众受益
1、了解高级别自动驾驶系统的相关模块与分工;
2、了解高级别自动驾驶系统在实际研发中可能遇到的问题以及解决方法。
讲师介绍:
李海泉
图森未来 总监
系统集成领域专家,在自动驾驶集成方向具有丰富的经验;图森未来集成部总监,负责自动驾驶系统的设计和开发;主持自动驾驶系统、传感器、高精地图、模拟器等多个核心模块的设计研发;负责高速场景和港口低速场景 L4 级自动驾驶项目研发。



完整演讲 PPT 下载链接:
https://qcon.infoq.cn/2018/shanghai/schedule
Java 避坑指南:Java 高手笔记代码篇
本迷你书包括 86 个业务开发中常见踩坑点。每一个知识点都相当的实用,是程序员业务开发中的必备避坑指南...
大厂招聘测试工程师,都看中哪些能力?
前端微服务在字节跳动的打磨与应用
技术高手如何有效转型技术管理者









评论