写点什么
创作场景
- 记录自己日常工作的实践、心得
- 发表对生活和职场的感悟
- 针对感兴趣的事件发表随笔或者杂谈
- 从 0 到 1 详细介绍你掌握的一门语言、一个技术,或者一个兴趣、爱好
- 或者,就直接把你的个人博客、公众号直接搬到这里
登录/注册
收录了 rush 频道下的 50 篇内容
Rush是基于Ruby开发的全新的面向对象shell。与类似bash的shell不同,Rush通过对象而不是字符串来进行命令交互。这使得通过常规 Ruby来实现对文件及其他对象的迭代成为可能。Rush还具备远程shell和其他更多的功能。InfoQ采访了Rush的创始人Adam Wiggins。
Scene.js 是一个基于 JavaScript 时间轴的动画库,用于创建动画网站,作为一个动画时间轴库,它允许你创建对象的移动和位置的时间顺序。

通过在自己的服务器上加载第三方JS代码,casper的技术人员成功将官网加载时间缩短1.7秒。
现在云原生领域已经涌现出大量的云原生中间件,如istio、envoy、argo等,但这些产品单个拿来使用的时候往往达不到我们系统的要求,或者配置起来很繁琐。比如我们想使用流量泳道等体系化方案时,单纯的改动一个场景不能支持。每个产品都支持体系化的流量泳道方

Freemesh是一个基于云原生思想的开源框架,它将云原生、Service Mesh和微服务技术栈统一为一个集成解决方案,旨在帮助开发者解决技术栈杂乱和技术选型困难的问题。通过Freemesh,开发者可以更加专注于业务逻辑的实现,而无需过多关注底层技术的复杂性和集成问
联邦云是一种创新性的技术平台,致力于将各大云计算巨头如阿里云、腾讯云和华为云等统一起来,以实现更高水平的合作和资源共享。通过联邦云,不同云平台可以无缝协同工作,相互之间实现数据交换和服务集成,为用户提供更加全面、高效的云计算解决方案。

CloudMecha是一个云原生机甲项目,与目前市面上流行的servicemesh(服务网格)类似,但CloudMecha才是真正的服务网格。就目前最火的项目istio来说,控制面下发配置信息到数据面,数据面充当的是服务代理的角色,这充其量算是一个代理网格,CloudMecha是将配置直
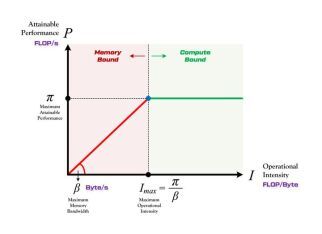
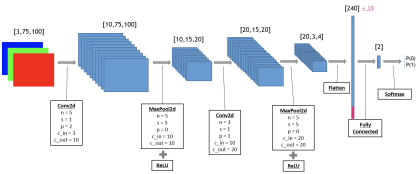
终端设备上运行深度学习算法需要考虑内存和算力的需求,因此需要进行模型复杂度分析,涉及到模型计算量(时间/计算复杂度)和模型参数量(空间复杂度)分析。

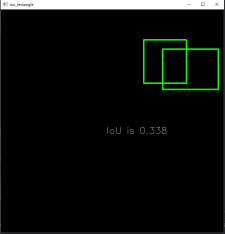
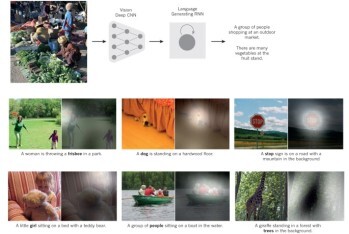
边界框:在⽬标检测领域⾥,我们通常使⽤边界框(bounding box,缩写是 bbox)来描述⽬标位置。边界框是⼀个矩形框,可以由矩形左上⻆的 x 和 y 轴坐标与右下⻆的 x 和 y 轴坐标确定。
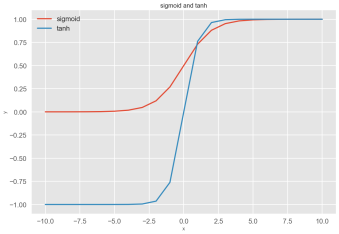
本文分析了激活函数对于神经网络的必要性,同时讲解了几种常见的激活函数的原理,并给出相关公式、代码和示例图。
Pytorch 中,张量的操作分为结构操作和数学运算,其理解就如字面意思。结构操作就是改变张量本身的结构,数学运算就是对张量的元素值完成数学运算。

工业智慧视觉应用主要涉及四个场景:识别、测量、定位、检测。`HALCON` 是德国 MVtec 公司开发的一款综合性的机器视觉标准软件,拥有全球通用的集成开发环境(HDevelop)。
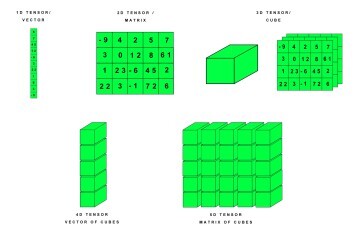
torch.Tensor 是一种包含单一数据类型元素的多维矩阵,类似于 numpy 的 array。可以使用使用 torch.tensor() 方法将 python 的 list 或序列数据转换成 Tensor 数据,生成的是dtype 默认是 torch.FloatTensor。
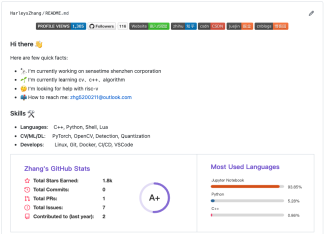
以前都是在 github 上默默更新自己的技术笔记仓库,从2022年国庆后开始把博客发布到知乎、csdn、博客园、掘金、51cto博客平台。
为了了解模型的泛化能力,即判断模型的好坏,我们需要用某个指标来衡量,有了评价指标,就可以对比不同模型的优劣,并通过这个指标来进一步调参优化模型。对于分类和回归两类监督模型,分别有各自的评判标准。
本文章是对《数字图像处理》书中知识概念、定理、公式的总结知识,并给出了自己的理解,部分涉及具体应用代码,主要是原理解析和算法总结。学习数字图像处理能让我们更深入理解计算机视觉领域的内容。
 京公网安备 11010502039052号 | 产品资质
京公网安备 11010502039052号 | 产品资质




