
内容摘要:
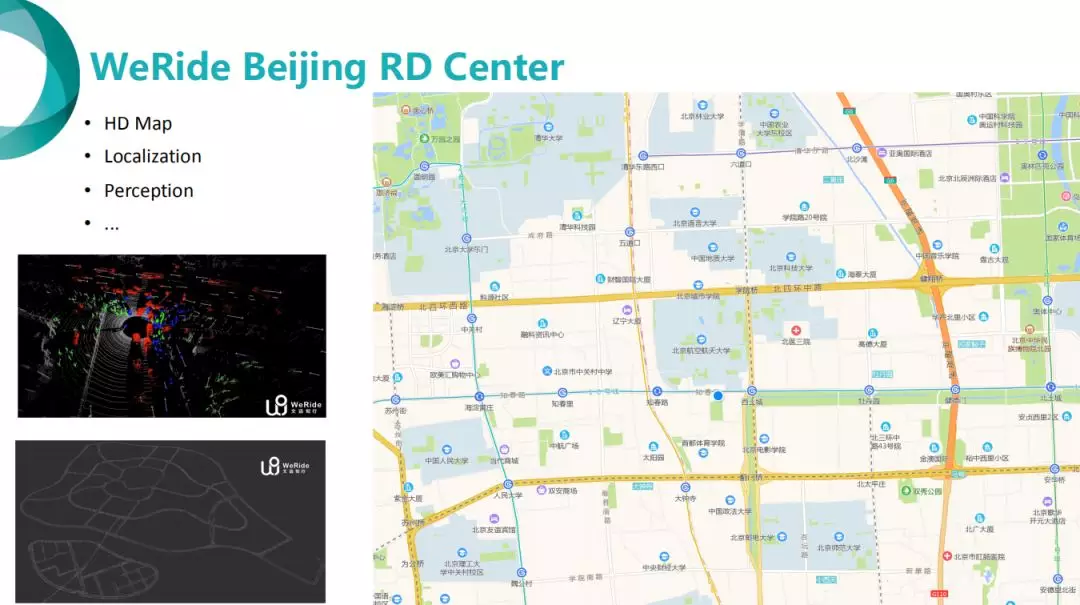
自动驾驶领域高精地图和定位技术介绍,地图定位技术与传统 SLAM 的共同点与差异;如何构建高精度的行车世界,高精地图解析;如何寻找在行车世界的精确坐标,定位技术解析;如何评判高精地图和定位技术,隧道案例解析。
开放式讨论:
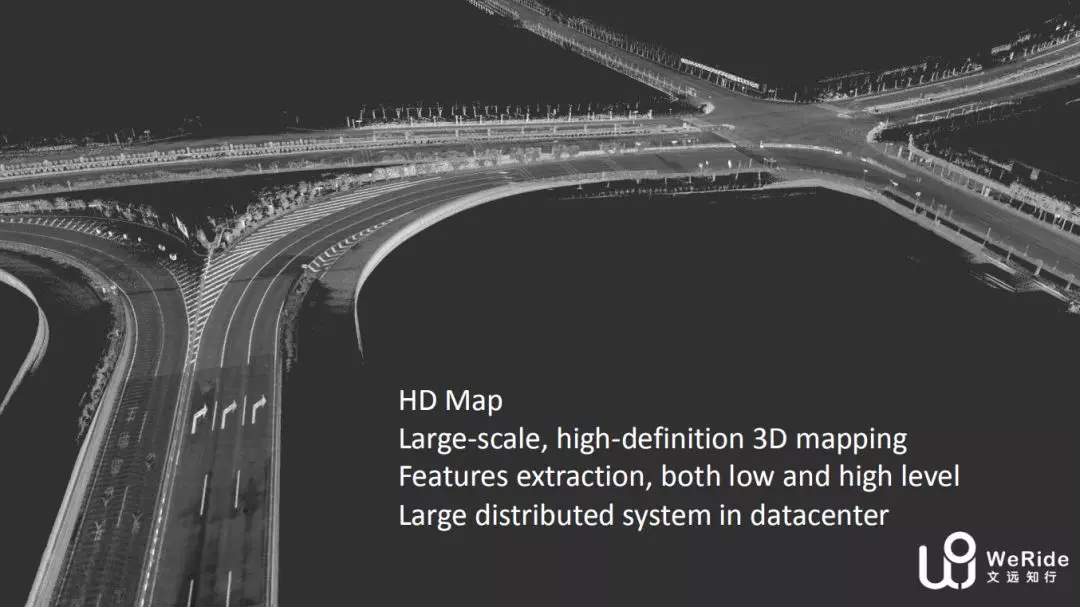
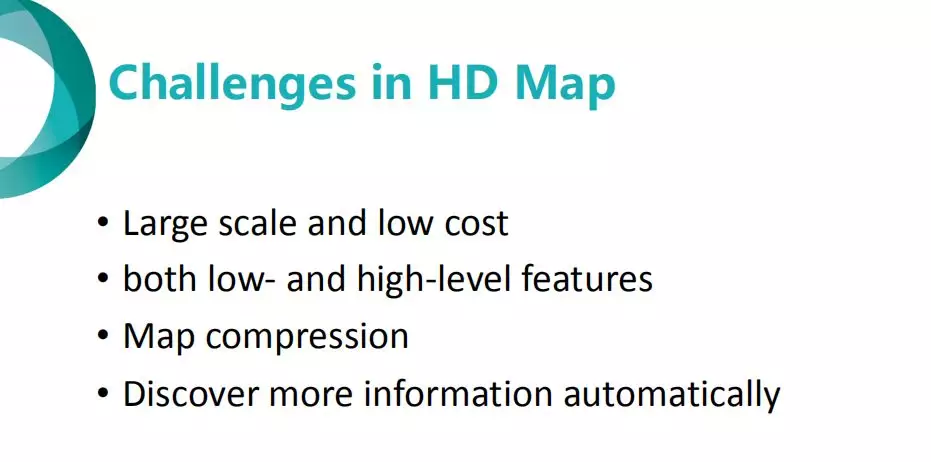
如何构建高精度的行车世界,地图在规模和自动化信息提取方面的挑战?
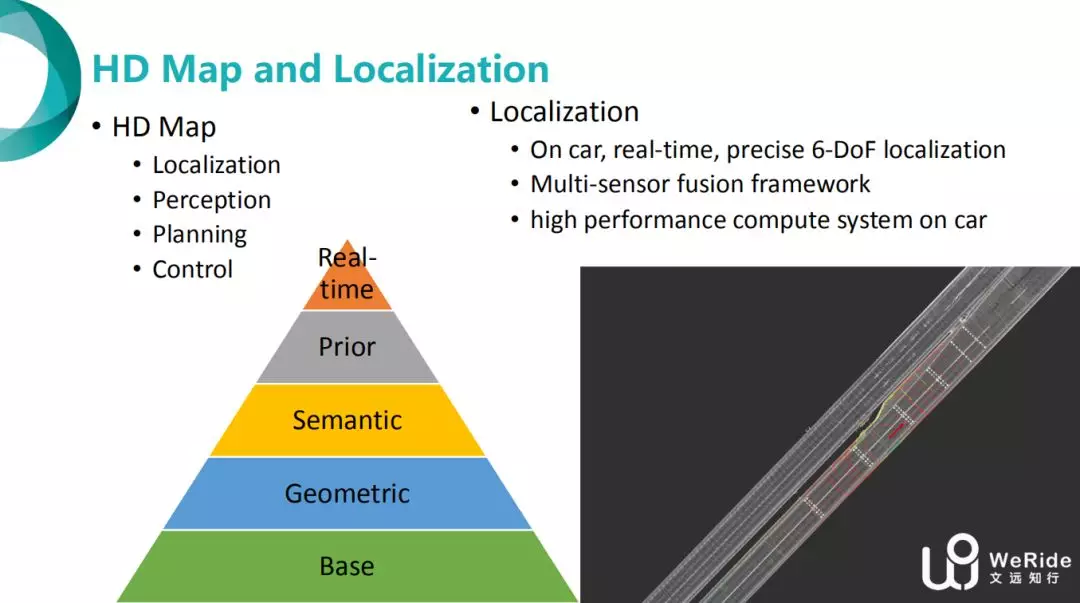
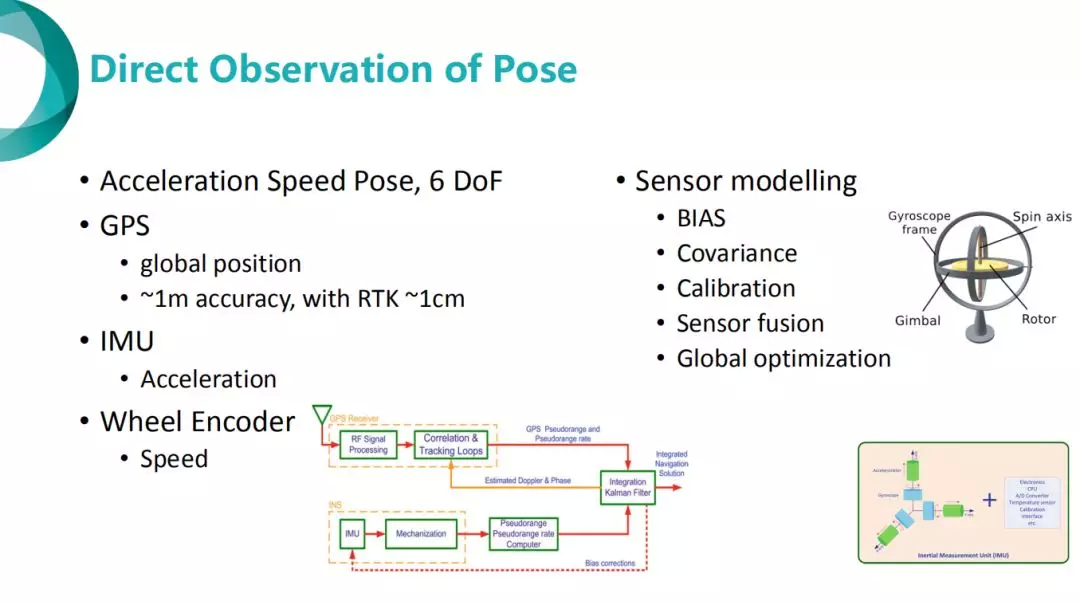
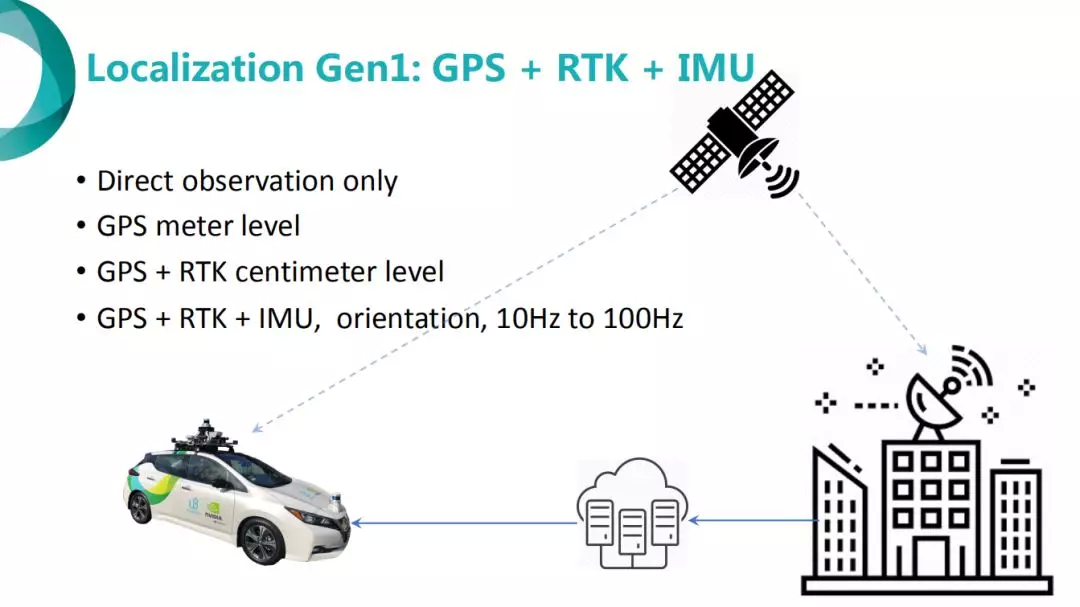
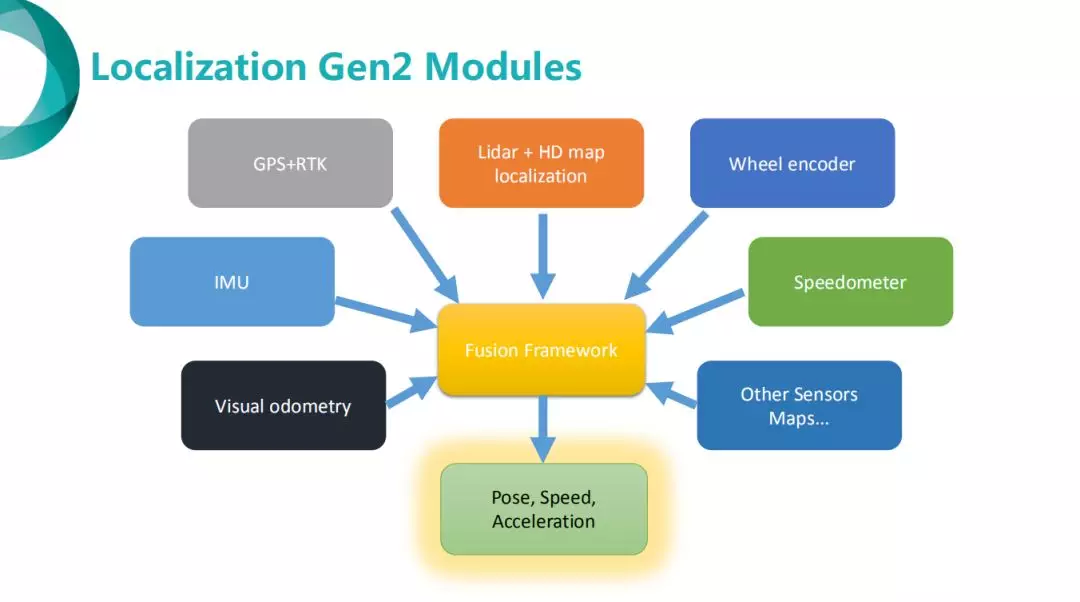
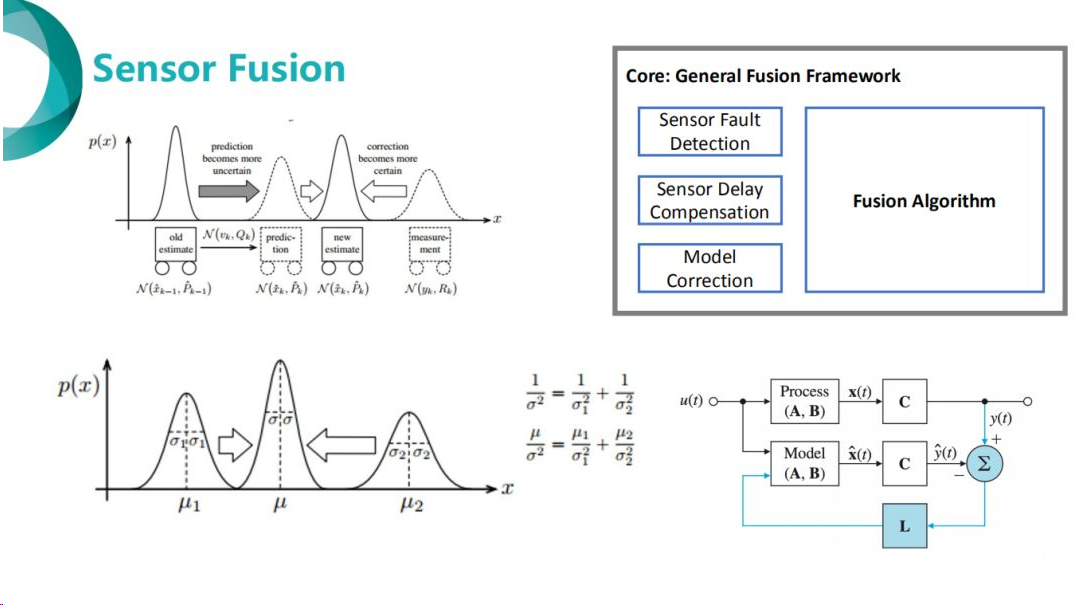
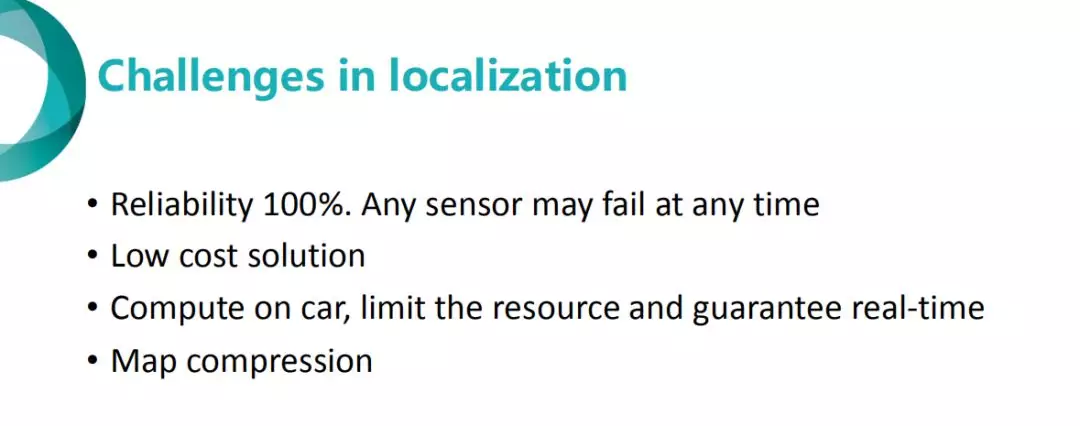
如何打造高可用性的定位解决方案,定位系统在实时性、算法复杂度、精度和成本方面的挑战?
视频:
https://v.qq.com/x/page/k0900ljoksb.html
PPT:


作者介绍:
王志谦,文远知行地图定位团队研发总监。2018 年带领团队攻克暴雨及无 GPS 穿越长隧道项目技术难题,创造国内自动驾驶记录。作为深度学习的资深从业者,也是最早期的深度学习训练和在线计算框架开发者。加入文远知行 WeRide 之前,王志谦是百度高级架构师(T8),获得 AI Fellowship 称号。个人多次获得公司最佳个人和最佳团队,团队获得公司最高奖。
本文来自 DataFun 社区
原文链接:
https://mp.weixin.qq.com/s/YKtPQBRSV1TVYY69JdQN4g

腾讯云云原生提质增效实践精选集 2024
《2024腾讯云云原生提质增效实践精选集》出炉,5大热门技术领域,13个行业精选标杆案例,痛点到解决方案全...

系统精简之道:如何以极低风险,高效清理线上无用代码
AIGC 助力大规模对象存储服务 OSS 的能效提升
海天瑞声在大模型数据的探索与实践












评论