
1 月 29 日,继连续发布空间感知与 VLA 基座模型后,蚂蚁灵波科技再次刷新行业预期,开源发布世界模型 LingBot-World。该模型在视频质量、动态程度、长时一致性、交互能力等关键指标上均媲美 Google Genie 3,旨在为具身智能、自动驾驶及游戏开发提供高保真、高动态、可实时操控的“数字演练场”。
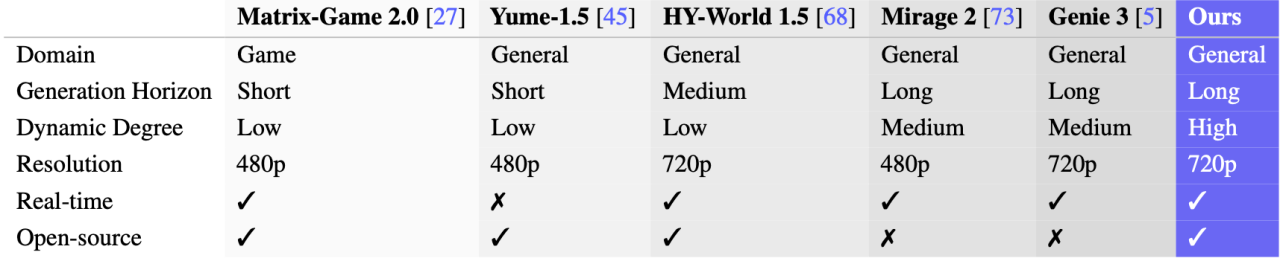
(图说:LingBot-World 在适用场景、生成时长、动态程度、分辨率等方面均处于业界顶尖水平)
开源地址:https://github.com/Robbyant/lingbot-world?tab=readme-ov-file
针对视频生成中最常见的“长时漂移”问题(生成时间一长就可能出现物体变形、细节塌陷、主体消失或场景结构崩坏等现象),LingBot-World 通过多阶段训练以及并行化加速,实现了近 10 分钟的连续稳定无损生成,为长序列、多步骤的复杂任务训练提供支撑。
交互性能上,LingBot-World 可实现约 16 FPS 的生成吞吐,并将端到端交互延迟控制在 1 秒以内。用户可通过键盘或鼠标实时控制角色与相机视角,画面随指令即时反馈。此外,用户可通过文本触发环境变化与世界事件,例如调整天气、改变画面风格或生成特定事件,并在保持场景几何关系相对一致的前提下完成变化。
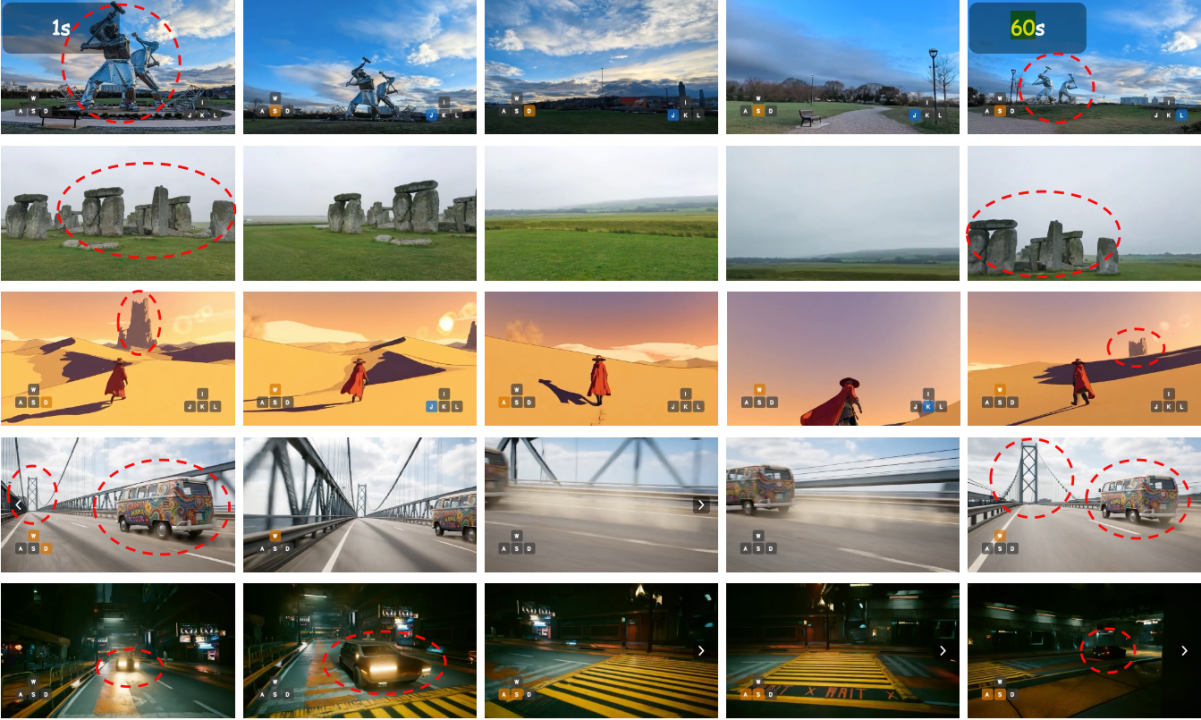
(图说:一致性压力测试,镜头最长移开 60 秒后返回,目标物体仍存在且结构一致)

(图说:高动态环境下,镜头长时间移开后返回,车辆形态外观仍保持一致)

(图说:镜头长时间移开后返回,房屋仍存在且结构一致)
模型具备 Zero-shot 泛化能力,仅需输入一张真实照片(如城市街景)或游戏截图,即可生成可交互的视频流,无需针对单一场景进行额外训练或数据采集,从而降低在不同场景中的部署与使用成本。
为解决世界模型训练中高质量交互数据匮乏的问题,LingBot-World 采用了混合采集策略:一方面通过清洗大规模的网络视频以覆盖多样化的场景,另一方面结合游戏采集与虚幻引擎(UE)合成管线,从渲染层直接提取无 UI 干扰的纯净画面,并同步记录操作指令与相机位姿,为模型学习“动作如何改变环境”提供精确对齐的训练信号。
具身智能的规模化落地面临一个核心挑战——复杂长程任务的真机训练数据极度稀缺。LingBot-World 凭借长时序一致性(也即记忆能力)、实时交互响应,以及对"动作-环境变化"因果关系的理解,能够在数字世界中"想象"物理世界,为智能体的场景理解和长程任务执行提供了一个低成本、高保真的试错空间。同时,LingBot-World 支持场景多样化生成(如光照、摆放位置变化等),也有助于提升具身智能算法在真实场景中的泛化能力。
随着“灵波”系列连续发布三款具身领域大模型,蚂蚁的 AGI 战略实现了从数字世界到物理感知的关键延伸。这标志着其“基础模型-通用应用-实体交互”的全栈路径已然清晰。蚂蚁正通过 InclusionAI 社区将模型全部开源,和行业共建,探索 AGI 的边界。一个旨在深度融合开源开放并服务于真实场景的 AGI 生态,正加速成型。
目前,LingBot-World 模型权重及推理代码已面向社区开放。




