
当大模型的聚光灯照向实体经济,一个“必答题”浮出水面:数字世界里惊艳的大模型技术,怎样才能变成现实世界中实实在在的生产力?
在 2025 世界人工智能大会(WAIC 2025)期间,蘑菇车联(MOGOX)发布首个物理世界 AI 大模型——MogoMind。在蘑菇车联展区,MogoMind 作为首个深度理解物理世界 AI 大模型,成为本届大会最受关注的人工智能技术应用之一。

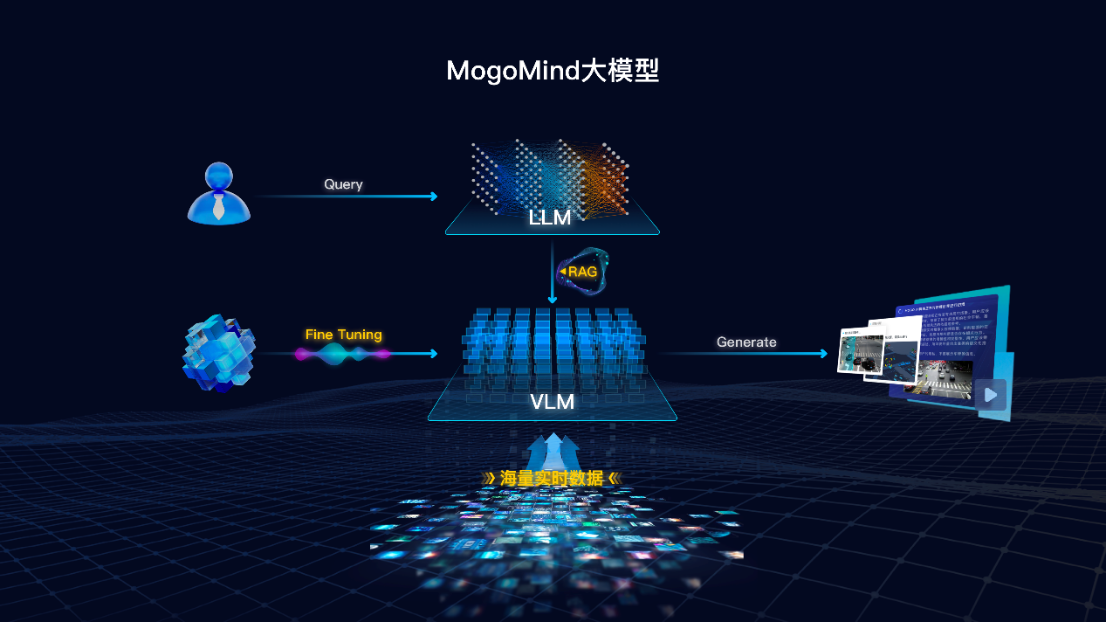
通过深度整合实时、海量的多模态交通数据,MogoMind 能够从物理世界的复杂数据中抽取意义、从经验中学习规则、在不同场景中灵活决策,形成对交通环境的全局感知、深度认知和实时推理决策能力,可以为多类型智能体提供实时数字孪生与深度理解服务,成为城市和交通高效运行的“AI 数字基座”。
依托 MogoMind 大模型能力,蘑菇车联推出多款 L4 级前装量产自动驾驶车辆,包括 RoboBus、RoboSweeper 和 RoboTaxi,深度融入全局感知、深度认知和实时推理决策能,推动自动驾驶技术在公共交通、城市环卫、无人零售等多场景应用。
其中,自动驾驶巴士 MOGOBUS 搭载端到端“MogoAutoPilot+MogoMind”系统,具备交通环境实时感知、道路数据分析计算、突发事件自主决策等多项能力,已在全国 10 个省份实现成功运营,安全行驶里程突破 200 万公里,服务乘客超 20 万人次。
同时,蘑菇车联围绕 AI 大模型在交通领域的应用,全面展示深度理解物理世界的 AI 大模型 MogoMind、智能体与物理世界实时交互的 AI 网络等多项核心技术产品,诠释 AI 与物理世界深度融合的未来图景。
70 亿参数规模,实现厘米级感知、毫秒级响应
在平衡对交通场景的理解能力、计算成本、训练时间等因素后,蘑菇车联为 MogoMind 选定的是 70 亿的参数规模。
据蘑菇车联方面表示,这一参数能够确保模型在保持表达能力的同时,通过优化计算架构(如 MoE 稀疏激活),将推理延迟控制在百毫秒左右,满足交通场景的实时性要求。相比千亿参数模型,70 亿参数规模在交通场景足以覆盖道路拓扑、交通规则、车辆行为等专业知识,避免冗余计算,又可大幅降低训练成本,同时通过增量训练(如实时数据持续注入)实现模型动态优化。
相比数字世界中的大模型,MogoMind 可以视为物理世界的实时搜索引擎,是理解现实世界的钥匙,通往现实世界的超级入口。
蘑菇车联指出,传统 LLM 是 “理解文字和语言的工具”,在虚拟文本空间中完成信息交互,物理世界实时搜索引擎与其有本质差异,是在真实物理世界中实现实时感知与决策。二者的核心差异在于,是否能与动态变化的物理世界形成“实时交互闭环”,具体体现在数据基础、认知对象、核心能力、应用逻辑等多个维度。
结合多模态动态处理、实时计算架构与物理世界认知模型,MogoMind 破解了物理世界动态数据的实时理解难题。依托覆盖城市全域的“通感算一体化”设备(如 AI 数字道路基站、路侧系统等),实时获取物理世界实时动态数据。其次,通过边缘+云端的协同处理,将数据在源头就进行融合处理,为理解世界提供更高精度和质量的数据。第三,基于多模态大模型技术,将动态数据转化为可理解的物理世界语义信息,也就是一个翻译过程,结合物理规律或交通规则,将数据转化为决策级信息;第四,通过强化学习与实时推理算法,实现动态数据到决策的即时转化。
通过接入物理世界实时动态数据,包括摄像头、毫米波雷达、激光雷达等传感器采集的车辆轨迹、交通流量、行人动态、路面状况、气象条件等,MogoMind 形成全局感知、深度认知和实时推理决策能力,能够从数据中抽取意义、从经验中学习规则、在场景中灵活决策。
据介绍,MogoMind 能够实现“厘米级感知、毫秒级响应”。例如,道路突发事故时,可在数秒内完成超视距感知、受影响范围计算、最优绕行路径规划,并同步推送预警至周边车辆与交管部门,避免因延迟导致的二次拥堵。
为此,MogoMind 可直接服务于物理世界的实体运营与优化,其价值在于通过实时决策直接提升物理世界的运行效率。核心应用场景包括:智慧交通(如实时调控信号灯、预警道路风险);自动驾驶(为 L4 级自动驾驶车辆和智能网联车辆提供超视距决策支持);城市管理(如大型活动期间全局交通资源调配)。
六大关键能力解读
作为首个深度理解物理世界的 AI 大模型,MogoMind 以实时性、全域性、平台化为基石,构建起六大关键能力,包括交通数据流实时全局感知、物理信息实时认知理解、通行能力实时推理计算、最优路径实时自主规划、交通环境实时数字孪生、道路风险实时预警提醒六大关键能力,解决了当前 AI 缺乏物理世界实时感知能力和全局认知系统两大核心问题。
通过全域覆盖的通感算一体化设备,MogoMind 能够全天候、不间断捕捉车辆行驶轨迹、速度变化、交通流量、行人动态等海量异构数据,并经过数据融合算法快速整合处理,为智能分析和精准决策提供数据基础。
借助物理信息实时认知理解能力,MogoMind 不仅能够识别路面状况、交通标识、障碍物的物理状态,还能将复杂的交通环境信息转化为可理解、可执行的智能决策建议,为交通管理部门和出行者提供应对方案。
交通流预测方面,MogoMind 通过交通流预测模型和通行能力评估算法,对道路通行能力进行实时动态计算,其综合考量交通流量、车辆类型、道路几何特征、信号灯配时等多种因素,利用强化学习技术,挖掘交通数据背后的规律和趋势,预测未来时段的交通流量变化趋势。
MogoMind 还提供实时路径规划、数字孪生、预警提醒等多种服务,能够无缝接入来自不同厂商、不同类型的交通设备与系统,包括道路传感器、车载终端、交通管理系统等,实现多源数据的统一管理和协同处理。
对于车企,MogoMind 提供多种接入方案,方便车企接入平台数据进行功能适配与应用开发。政府部门、交管部门、车企都能在 MogoMind 找到适合自身需求的应用场景,实现资源共享与优势互补,推动 AI 与交通生态的融合发展。
基于以上能力,MogoMind 担当起城市交通“决策中枢”、车辆行驶“全能助手”、自动驾驶“隐形基座”三大角色。

交通管理领域,MogoMind 让交通管理者轻松掌握整个城市交通系统的运行全貌,无论是宏观层面的交通流量调控、微观层面的单个路口优化,还是道路突发事件应急处理,都能基于实时动态数据的融合分析做出科学决策,实现城市交通管理的整体协同优化。
出行领域,MogoMind 提供物理世界实时信息的深度理解与规划决策服务,超视距路况提醒、最优路线动态规划、盲区风险实时感知等能力全面守护驾驶安全,提升出行效率。自动驾驶领域,MogoMind 通过多源数据融合和长尾场景持续学习,反哺自动驾驶模型训练,进一步提升自动驾驶技术安全性与可靠性。
跨场景适配,包括机器人及更多智能体
值得注意的是,MogoMind 定位为“开放平台”。MogoMind 具备数据可控性与价值反哺的双重设计,车企无需有数据主权让渡的担忧。
并且,作为“智能体与物理世界实时交互的 AI 网络核心引擎”,MogoMind 突破了单一交通场景的限制。
随着这一物理世界 AI 大模型的持续迭代,未来其还能向更深层次演进,为具身智能机器人、低空经济等领域提供技术支撑;通过 AI 网络的持续扩展,还可实现对更多类型智能体的支撑。
据蘑菇车联介绍,MogoMind 在设计之初就考虑了跨领域、跨场景的平滑迁移需求,通过统一的感知、认知、决策框架以及平台化兼容设计和多源数据融合能力,将已在交通场景中验证的多模态融合能力迁移至其他领域,实现对不同智能体的共性支撑。
另外,MogoMind 的六大关键能力和三大特征(实时性、全域性、平台化)也具备跨场景适配性。
比如,“多模态动态融合架构”可处理无人机的航拍数据、机器人的环境感知数据,与交通场景的传感器数据形成统一融合框架;“实时数字孪生”能力不仅可模拟交通环境,还能为无人机飞行空域、机器人作业区域构建虚拟镜像,支持多智能体的协同决策;“平台化”特征使其能无缝接入不同类型智能体的终端设备(如无人机的导航系统、机器人的控制系统),提供标准化的数据交互与决策支持。




