
来自谷歌与麻省理工学院的研究人员发表了一篇论文,提出了一个用于扩展多智能体系统的预测框架。该框架揭示了工具使用与系统协同之间存在权衡关系,可用于为特定任务选择最优的智能体架构。
该扩展模型依赖于系统的多个预测因素,包括底层大语言模型的智能指数、单智能体的基线性能、智能体数量、工具数量以及协调指标。研究人员发现模型中存在三种主导效应:工具‑协调权衡——对工具需求较高的任务,在多智能体带来的开销下表现会更差;能力饱和——当单智能体基线性能超过某一阈值后,增加智能体的收益会逐渐递减;以及拓扑依赖的错误放大——集中式编排能够减轻这种错误放大效应。他们还发现,最优的协调策略取决于任务类型:金融推理任务更适合采用集中式编排,而网页导航任务在分散式策略下表现更佳。在独立测试集上进行评估时,该扩展框架对最优协调策略的预测准确率达到 87%。谷歌表示:
随着 Gemini 等基础模型的持续进步,我们的研究表明:更智能的模型并不会取代对多智能体系统的需求,反而会加速其发展——前提是采用正确的架构。从启发式方法转向定量原则,我们便能构建出下一代 AI 智能体,它们不仅数量更多,而且更智能、更安全、更高效。
谷歌团队根据智能体的不同协调方式将多智能体架构分为以下几类:独立式——智能体之间无协调;集中式——智能体仅与中央编排器通信;分散式——点对点协调;混合式——兼顾集中式与分散式。每种架构都包含若干配置参数,如智能体数量、单个智能体的迭代次数等,且在计算复杂度、内存占用与大模型调用次数上各不相同。
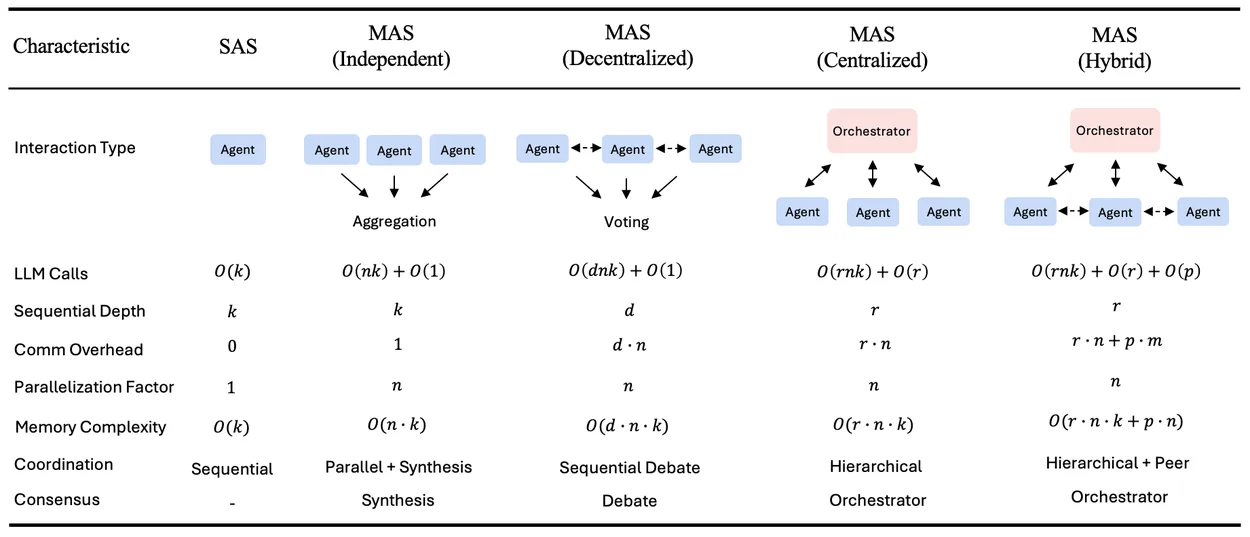
多智能体架构,图片来源:Google Research
研究人员开发的扩展模型是一个包含 20 项的回归模型,基于 9 个预测变量及其交互项构建。他们剔除了“无明确机制支撑的交互项……以避免过拟合”。谷歌指出,该模型确实存在一定局限性。研究团队特别发现,“工具密集型”任务会导致多智能体协调效率降低,并提出需要“为工具密集型任务设计专门的协调协议”。
在 Hacker News 上关于这篇论文的讨论中,多位用户分享了他们在多智能体工作流方面的实践经验。一位用户写道:
我在日常工作中构建了大量智能体工作流。在确定编排策略时,我发现一个非常有效的方法:在规划阶段让智能体给出推荐方案。这种借助智能体自身来提升性能的技术,是我高效运用这项技术的关键。当然,效果因人而异。我主要使用 Claude Code,因此其他模型的效果如何尚不明确。
多智能体系统的协作与编排策略是当前活跃的研究方向。2025 年,InfoQ 曾报道亚马逊为 Amazon Bedrock 推出的多智能体协作框架,该框架可让专业智能体在主管智能体的协调下协同工作。今年年初,InfoQ 还报道了谷歌发布的多智能体系统八大基础设计模式指南,指南对每种模式给出了详细说明,并附带谷歌智能体开发套件(ADK)的示例代码。
原文链接:




