
星尘智能创立于 2022 年,创始成员来自于腾讯 Robotics X,名字来源于拉丁语谚语“Ad astra per aspera”,意为“穿越艰难,抵达星辰”。最近他们发布了一个全身操作的系统性框架的技术解读报告,揭秘 Astribot 是如何成为你的家务助手,帮你倒垃圾,整理散落的鞋子,抬猫砂的,本文主要对这篇技术报告做⼀个解读,以解开 Astribot 的智能密码:
四大亮点
创造一个真正通用的智能机器人,面临三大核心挑战:
本体设计:需要一个既安全,又具备人类级别灵活性、力量和活动范围的机器人身体。
数据收集:如何让机器人高效地向人类学习?需要一个直观、易于使用的系统,让普通人也能“教会”机器人。
学习算法:需要一个强大的“大脑”,能从收集到的人类演示视频中,学会复杂的全身协调动作。
全身自主操控的三大挑战
星尘智能用四个亮点解决了这三大挑战:
亮点一:从硬件构型、数据采集到策略学习,提出并验证了面向通用类人操作的“端到端闭环框架”和完整解决方案。
亮点二:区别于连杆技术路线,采用有力量但更安全的类人腱绳技术路线的,面向家用场景进行类人本体设计。
亮点三:算法层 DuoCore-WB 策略学习系统,利用泛化性更好的末端执行器空间建模和并用 RTG 方法平滑机器人动作输出。
亮点四:打造低成本、安全、低延时、易用的全身级而非桌面级的遥操作平台,让非专业用户也有机会在家中训练一个机器人。
本体设计:以腱绳驱动为技术路线的本体(Astribot S1)
多方面超越人的功能性本体设计
研究的核心是一个名为 Astribot S1 的人形机器人。它被设计用来模仿人类的身体结构和能力:
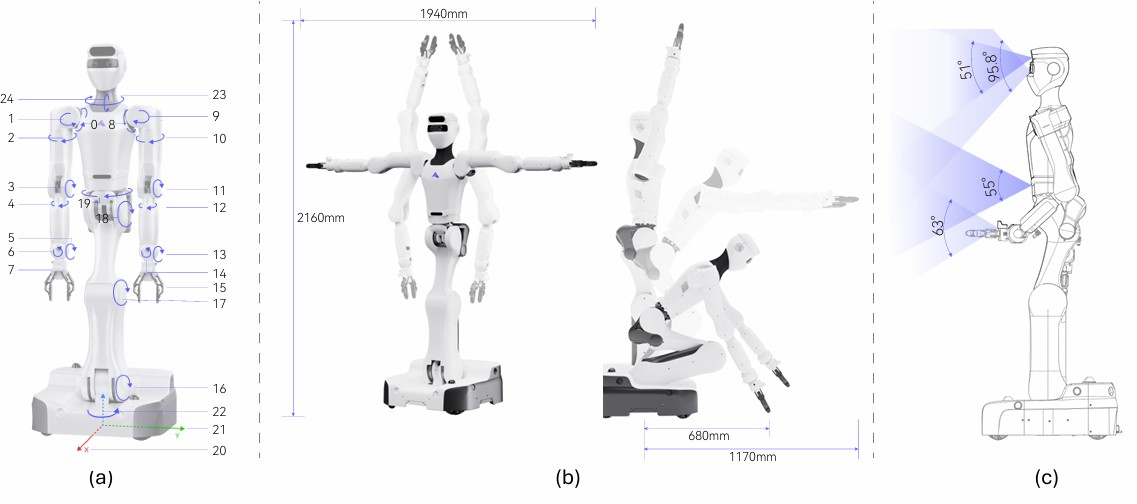
Astribot S1 本体设计
人形结构:它拥有两条和人类一样有 7 个自由度的手臂;折叠式的举升机构,和 4 自由度的躯干,使得机器人可以在站立和下蹲间切换,垂直可达范围到 2 米,再加上有 2 个自由度的头部和一个可以全向移动的底盘。
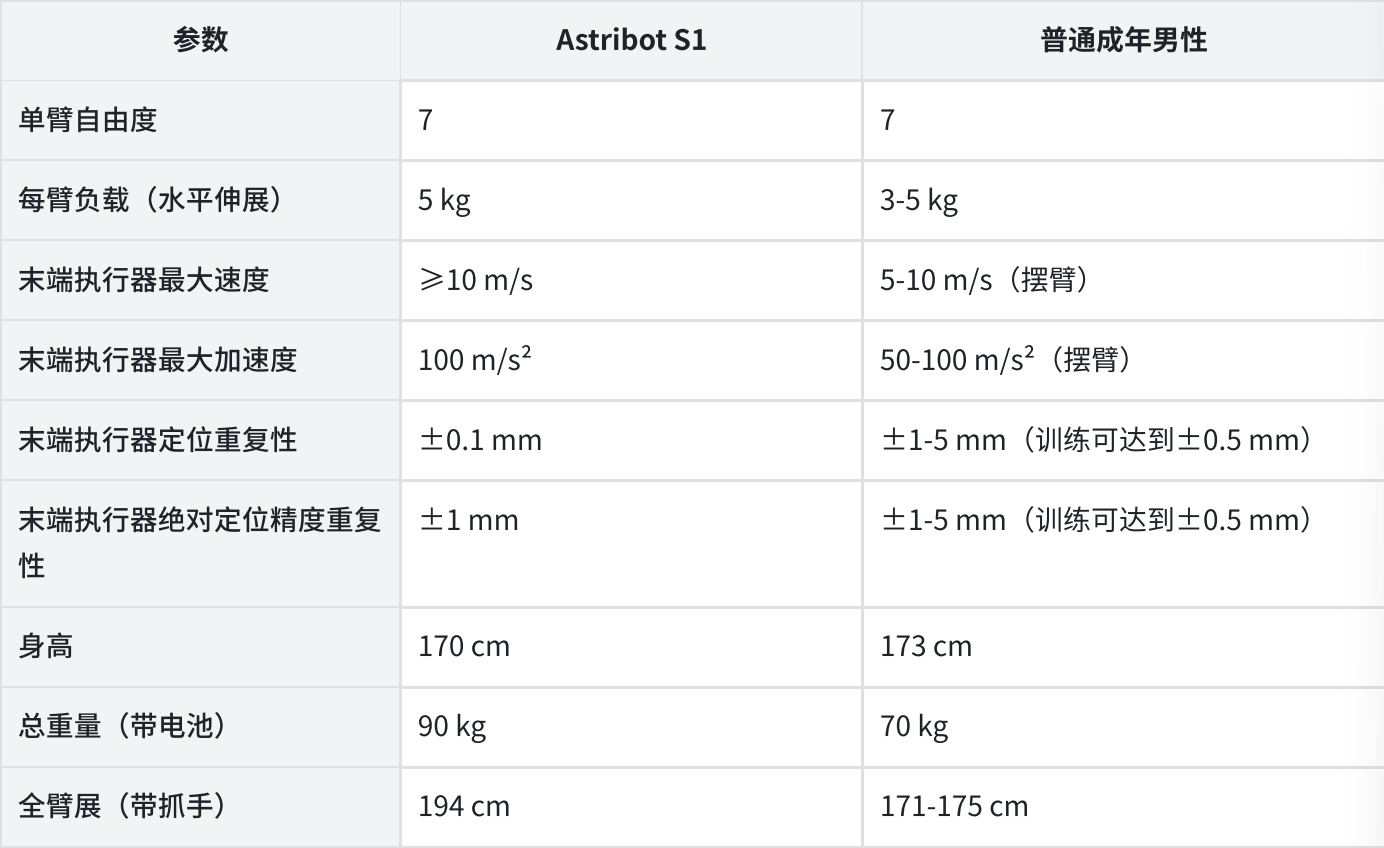
超越人类的性能:在多项关键指标上,S1 达到了甚至超过了普通成年男性的水平。它的身高约 1.7 米,双臂展开可达 1.94 米。单臂可以举起 5 公斤的重物,手臂末端(手部)的最大挥动速度可以达到每秒 10 米,末端重复定位精度可做到±0.1mm。
丰富的感知:为了“看清”世界,S1 在头部、胸部和两个手腕上都安装了多个摄像头,能从不同视视角获取高分辨率的彩色和深度图像,还有一个激光雷达用于 360 度环境感知和地图构建。
腱绳技术路线
星尘智能的本体设计采用了区别于行业的技术路线,即腱绳驱动的技术路线。
腱绳系统可以像人类肌肉一样通过“收缩”和“放松”来驱动关节,通过电机驱动缆绳来产生力量和运动,从而进行复杂和精细的运动。这条技术路线有以下的优势:
高分辨率的力控制:轻量化结构、低摩擦(传动效率>90%)以及高回驱性(>80%,即缆绳可以有效地反向恢复其原始状态的能力)带来柔性缓冲与高分辨力控,特别适合需要精细触觉反馈的 AI 任务。
更强的负载能力:相较刚性连杆结构,腱绳系统单位重量承载力更高,整体负载能力提升约四倍。
减少了反向间隙和惯性:在拉力作用下能够自动适应并紧贴传动装置,反向间隙仅为半直驱系统的 30%,与低惯性特性⼀起提升了动态响应与能效。
增强的紧凑性和改进的安全性:腱绳系统具有更加紧凑的设计,同时由于电缆的柔性,能够有效避免传统硬件带来的碰撞风险,提高了安全性。
但这种技术路线也带来控制算法复杂,腱绳材料易磨损等难题,为了解决这些问题,星尘智能引入混合刚柔体动力学建模,实现更高精度的动态轨迹跟踪与实时响应,并通过优化传动机制和制造⼯艺,显著提升了系统的耐久性与稳定性。
低成本全身遥操作系统:用 VR 眼镜和手柄“手把手”教机器人
为了让机器人学习,研究人员开发了一套低成本且极其直观的遥控操作系统。这个遥操作系统,并非我们常看到的桌⾯级遥操系统。实际上是为家庭用户打造了一个全身协调,且能干活的机器人训练遥操系统。同时它也抛弃了沉重的全身动捕装备,不到 300 美金即可部署这个遥操系统。

易操作 &低延时
操作员只需要使用一套市面上常见的 VR 设备-Meta Quest 3S,就能像控制游戏角色一样控制机器人。星尘智能还重新配置了 Meta Quest 3S 摇杆以支持更用户友好地直观遥操作和演示录制。
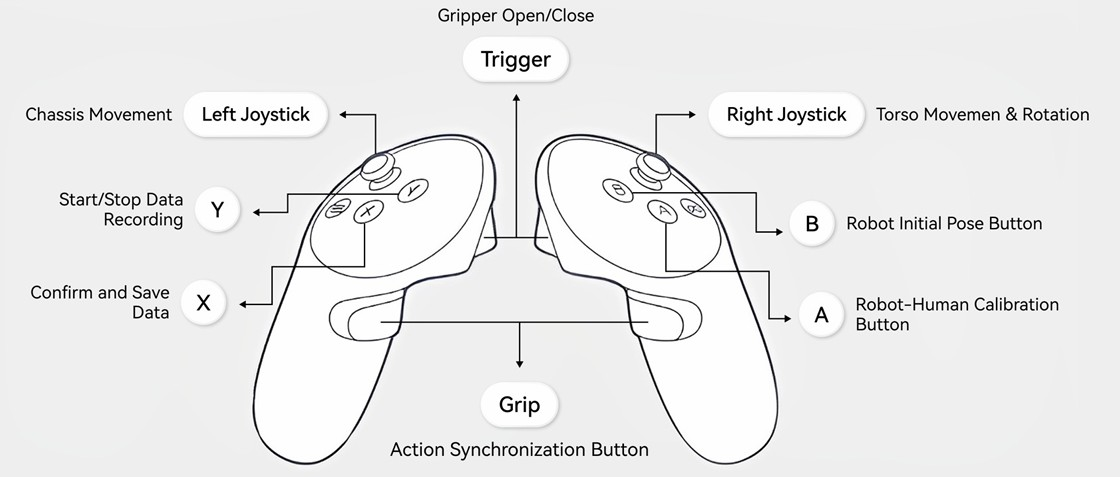
更用户友好的操作配置
这个系统提供两种模式:
第一人称视角:操作员戴上 VR 头盔,能实时看到机器人眼中看到的第一视角画面。这非常适合进行需要精细操作的远程任务,比如折叠衣物或整理小物件。
第三⼈称视角:操作员站在机器人旁边进行遥控,可以直接观察机器人的全身姿态。这种模式延迟极低,非常适合演示大幅度的全身动作,例如下蹲捡东西或搬运重物。
系统配备了低延迟控制方案,以 100Hz 的频率运行,从遥操作指令到机器人动作的端到端响应延迟仅为 20ms,实现流畅响应。在第一人称视角模式下,图像传输延迟约为 100ms。
通过这套系统,即便是非专业人士也能轻松地演示各种家务活,系统会完整记录下整个过程,为机器
人的“大脑”提供高质量的学习素材。
安全性
除了强大的功能,研究人员在设计这套系统时还特别关注了安全性,在人机共存的环境中,安全是第
一位的。系统有两重安全保护机制:
保护机器人自身:
防摔倒:系统会实时监控机器人的重心,确保它在快速移动或做出各种复杂姿势时都不会失去平衡而摔倒。
防自撞:系统内置了防碰撞引擎,能确保机器人的手臂、身体等各个部件在运动时不会自己撞到自己。
减轻碰撞力度:
天生的“柔性”:机器人采用了一种“腱绳驱动”的设计,使其不像传统刚性机器人那样“硬邦邦”,天生就带有一点“柔性”,可以在碰撞时吸收部分冲击力。
主动“卸力”:机器人不需要额外的力传感器,就能通过精确的算法估算出外部的碰撞力。一旦检测到接触,它会立刻调整电机,主动地去“卸力”,从而有效防止巨大的冲击力对人或物体造成伤害。
兼顾高质量示教与低成本
其次是高质量的“教学”示范,这套 VR 遥控系统能让机器人几乎 100%成功地“复现”操作员的演示动作,跟随误差也非常小。另外还有极低的成本,整套硬件的成本不到 300 美元。
DuoCore-WB 学习算法及其后处理方法
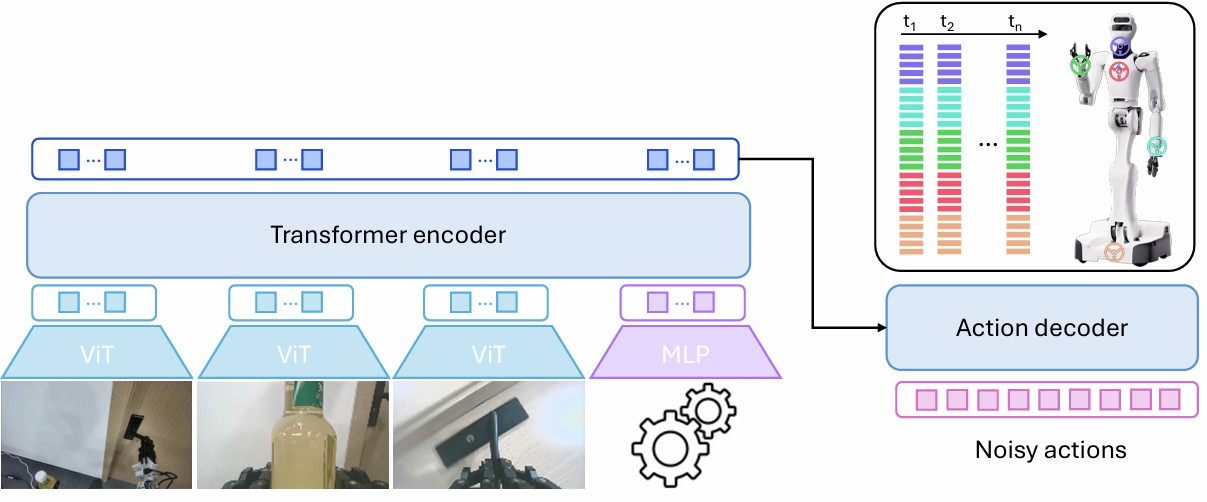
机器人的“大脑”:DuoCore-WB 学习算法
有了强大的身体和高效的学习方式,最关键的就是机器人的“大脑”——一个名为 DuoCore-WB 的学习算法。它通过模仿学习,观看人类操作员的演示录像来掌握技能。其核心设计思想十分巧妙:
不学关节,学“目标”:传统方法是让机器人学习每个关节应该转动多少度,这非常复杂且容易出错(你伸手拿杯子时不会去想“肩膀转 30 度,手肘弯 50 度”)。DuoCore-WB 则让机器人直接学习 “手部应该移动到什么位置”,这被称为在“末端执行器(EE)空间”中学习,大大提高了精度和效率。
不学绝对位置,学“增量”:机器人学习的不是移动到房间的某个绝对坐标,而是基于当前手部位置的“微小变化”(例如,“向前移动⼀点,向左移动一点”)。这种“增量式”学习使得机器人的动作轨迹非常平滑流畅,避免了卡顿和抖动。
从“自己”的视角学习:最关键的一点是,机器⼈是相对于自己手腕上摄像头的“自我中心视角”来学习动作的。这使得视觉观察和动作目标高度统一。无论机器人身体如何移动,它的“手眼协调”能力都非常稳定,特别适合需要全身移动的复杂任务。
这类“以目标为中心的增量策略”,天然具有一定的鲁棒性:即使前一步略有偏差,下一步仍会基于当前位置进行目标修正,从而抑制误差的逐步放大。
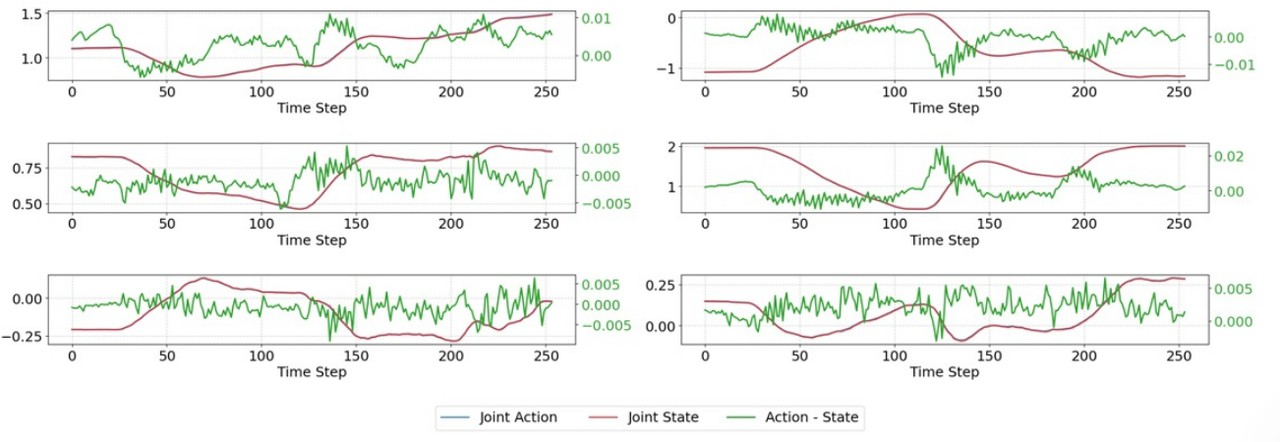
让动作更自然:实时轨迹生成模块 RTG
虽然当前主流模仿学习策略已经可以在每个时刻输出一个“动作块”(action chunk),但这些离散
片段之间的衔接往往并不自然,容易出现两个问题:
块内的抖动(intra-chunk jitter):连续帧之间缺乏一致性;
块与块之间的跳跃(inter-chunk discontinuity):前后动作衔接突兀、不连贯,容易出现“动作断崖”,尤其是复杂的全身动作中更明显。
对此星尘智能提出了“实时轨迹生成模块(RTG)”的后处理模块,并用两个策略来解决这个问题:
识别并丢弃已过时的片段内容:由于策略推理和轨迹处理存在不可避免的延迟,RTG 会主动识别并剔除那些在延迟期间已“失效”的动作帧,避免执行基于旧观测生成的控制指令,从而保障系统的实时性与响应准确性。
与旧动作轨迹进行“平滑过渡:使用一种叫“二次规划优化(QP)”的方法,让新旧动作更丝滑。在保证动作轨迹平滑性的同时,动态平衡对旧轨迹的一致性与新动作输出的跟随性,并严格施加速度约束以确保硬件安全。这就像在电影剪辑时,加如淡入淡出,让两个镜头无缝衔接。
这个策略的优势在于:兼容性强:不依赖具体策略结构,可用于多种算法;鲁棒性高:对延迟不敏感,可适应推理不稳定或网络干扰;执行可控:引入物理约束,保护硬件,保障系统安全稳定运行。
成果展示:家务全能手

星尘智能团队针对 6 个常见的家用场景做了测试,实验结果令人印象深刻:
递送饮料:机器人能自己开门,进入房间,并将饮料放到桌上。

储存猫粮:能用双臂抬起约 2 公斤重的猫粮袋,放入矮柜并关上柜门。

扔垃圾:能走到垃圾桶边,用手按下开关打开盖子,扔掉纸杯,再盖上盖子。

整理鞋子:将地上的鞋子捡起,并整齐地摆放到鞋架上。

扔玩具逗猫:从地上捡起玩具并逗猫。

收拾玩具:连续不断地用双臂将散落的玩具捡起并放入收纳箱。

在这些任务中,经过学习的机器人取得了平均 80%的成功率,在“扔玩具”等任务上甚至达到了 100%的成功。

结论与未来
Astribot Suite 通过其创新的硬件、直观的遥控系统和高效的学习算法,成功地将三者融为一体,向通
用型智能机器人的目标迈出了坚实的一大步。尽管在处理更需要灵巧性或长期记忆的任务上仍有局限,但这项研究无疑为下一代能够在真实世界中协助人类的智能机器⼈奠定了重要的基础。未来,团队计划在硬件、人机交互和模型算法上继续深化,推动机器人技术进入更广阔的现实世界应用。




