HarmonyOS 6.1 全栈实战录 - 04 镜像世界:Spatial Recon Kit 3D 空间重建与企业级高精度建模实战

HarmonyOS 6.1 全栈实战录 - 04 镜像世界:Spatial Recon Kit 3D 空间重建与企业级高精度建模实战
在前三篇的实战进阶中,我们完成了从沉浸式视效表达(01 篇)、人脸微表情感知(02 篇)到 20 点骨骼动态捕获(03 篇)的全方位探索。可以说,我们已经掌握了“数字镜像”中关于“人”与“表象”的核心技术。
然而,元宇宙与空间计算的终极命题,在于如何将“物理世界”本身数字化。
HarmonyOS 6.1 带来的 Spatial Recon Kit(空间建模服务) 正是破解这一命题的钥匙。它标志着鸿蒙生态从单纯的“虚拟渲染”正式跨入了“现实重建”的深水区。本篇我们将深入拆解 6.1 版本新增的 3DGS (3D Gaussian Splatting) 建模能力、Native 会话管理以及三维模型导出的全链路流程,带你亲手构建一个企业级的空间捕捉系统。
二、 全景视图:Spatial Recon Kit 核心能力地图
什么是空间建模服务呢?通俗的话讲就是给手机装上了一个 “3D 扫描仪”。它能让你通过手机摄像头对着现实世界的物体或场景绕一圈,然后就在手机里生成一个一模一样的 数字孪生(3D 模型)。想象一下,以前我们要把一张桌子“搬进”电脑里,需要专业建模师用软件画好几天。现在,你只需要拿着手机绕着桌子走一圈:
拍照采像:手机会捕捉物体各个角度的照片和深度信息。
大脑计算:手机底层的算法(尤其是 6.1 新出的 3DGS 技术)会像拼图一样,把这些碎片信息合成一个全方位的 3D 模型。
瞬间成型:短短几分钟,一个带纹理、带光影、甚至能反射光线的 3D 模型就出现在你手机里了。
在深入 6.1 的新特性之前,我们首先需要从宏观上理解 Spatial Recon Kit 的全量能力图谱。Spatial Recon Kit(空间建模服务)是 HarmonyOS 为开发者提供的三维场景构建方案,它旨在解决移动端对物理世界的“数字化建模”难题。其核心能力支柱包括:
多视角物体建模 (Object Reconstruction):基于经典的照相测量学原理,通过多张不同角度的照片,提取特征点并进行稠密匹配,生成具有高精度纹理的 Mesh 网格模型。
空间扫描与对齐:配合 AR Engine 的 SLAM(即时定位与地图构建)能力,在捕捉图像的同时获取相机的位姿信息,从而确保生成的模型具有真实的物理尺度和世界坐标系坐标。
材质与光照感知:在建模过程中提取环境的光照估计(Lighting Estimation),使生成的模型在不同虚拟场景中能产生自然的明暗变化。
2.1 既有能力的局限与痛点
在 6.1 版本之前,空间重建面临着几个明显的“企业级”落地障碍:
训练耗时:传统的 Mesh 生成需要复杂的拓扑优化和 UV 拆分,在移动端往往需要数十分钟甚至更久。
反馈缺失:建模过程是一个“冷盒”,用户无法实时感知当前的重建质量和进度,经常出现拍了很久最后才发现效果不佳的情况。
任务管控能力弱:无法在建模中途暂停,也无法针对前后台运行进行精细化的功耗管理。
6.1 之前从 6.0.1 开始,HarmonyOS 值提供了 ArkTS 的接口 spatialRender,只能用来渲染 3DGS 数据,展示 3DGS 渲染场景,而无法使用系统 API 进行重建。在 6.1 新增了 C API 接口用于支持重建等。
三、 跨越与革新:HarmonyOS 6.1 的代际演进
针对上述痛点,HarmonyOS 6.1 版本的 Spatial Recon Kit 实现了从“离线建模”到“实时交互”的跨越。
3.1 3DGS (3D Gaussian Splatting) 场景建模
6.1 版本最核心的增强是引入了 3DGS 模型支持。与传统的 Mesh 不同,3DGS 是一种基于点云辐射场的表达方式。建模速度提升了 5-10 倍,且能完美还原透明、高反光物体的质感(这在之前的版本中几乎是不可能完成的任务)。
以前的 3D 模型是一堆硬梆梆的“三角形面片”,看起来总有点假。而 6.1 版本新增的 3DGS(高斯溅射) 技术,就像是用无数个“半透明的发光点”来描绘物体,它能极好地还原毛发、玻璃反光等细节,看起来就像照片一样真实,但它是可以 360 度旋转查看的。
3.2 任务级精细化管控
6.1 新增了完整的任务控制流:
会话管理增强:支持
Pause(暂停)和Resume(恢复)。资源调度优化:支持设置
FOREGROUND(前台高性能)与BACKGROUND(后台低功耗)模式,确保用户在多任务切换时的系统稳定性。进度实时查询:支持以浮点数(0.0~1.0)的形式精确获取建模和文件保存的进度。
四、 深度解构:Spatial Recon Kit 全量 API 规格参考
在 HarmonyOS 6.1(23) 中,spatial_recon_interface.h 定义了构建企业级 3D 重建应用所需的所有底层原语。为了帮助开发者实现精准的任务控制,以下是对全量 API 的详尽拆解。
4.1 核心结构体 (Structs)
HMS_SpatialRecon_Session:空间重建会话句柄。它是整个重建管线的核心上下文,负责持有重建状态、内存池以及异步任务队列。
HMS_SpatialRecon_DataFrame:定义了空间重建的数据原子。
包含:相机内参、位姿矩阵(Pose)、时间戳以及原始图像数据。
注意:目前仅支持 RGB 格式输入。
HMS_SpatialRecon_ModelWriteInfo:模型持久化配置。
字段包括:
outputPath(文件保存路径)、format(导出格式)。AREngine_ARSession & AREngine_ARFrame:来自 AR Engine 的句柄。它们作为不透明句柄传入,允许重建引擎直接提取 AR 追踪层的低延迟传感器数据。
4.2 枚举类型全量解析 (Enums)
4.2.1 状态码 (HMS_SpatialReconStatus)
这是判定接口调用是否成功的唯一依据,包含了丰富的错误语义:

4.2.2 建模阶段 (HMS_SpatialReconStage)
用于 GetProgress 接口返回,指示当前流水线所处的位置:
SPATIAL_RECON_STAGE_INIT:资源准备中。SPATIAL_RECON_STAGE_BUILDING:计算密集期,正在生成 3DGS 模型。SPATIAL_RECON_STAGE_PAUSED:任务已挂起。SPATIAL_RECON_STAGE_FINISHED:重建完成。SPATIAL_RECON_STAGE_SAVING:正在执行文件序列化导出。SPATIAL_RECON_STAGE_UNKNOWN:状态异常。
4.2.3 运行模式 (HMS_SpatialReconRunningMode)
SPATIAL_RECON_RUNNING_FOREGROUND_MODE:默认模式。系统分配最高 CPU/GPU 权重,建模速度最快。SPATIAL_RECON_RUNNING_BACKGROUND_MODE:后台模式。系统限制资源占用,优先保障前台流畅,重建速度变慢。
4.2.4 输出格式 (HMS_SpatialReconOutputFormat)
SPATIAL_RECON_OUTPUT_FORMAT_PLY:导出 3DGS 专用的高斯点云文件。SPATIAL_RECON_OUTPUT_FORMAT_MP4:导出环绕预览视频。
4.3 函数接口详述 (Functions)
4.3.1 会话生命周期
HMS_SpatialRecon_IsSupport:入参为模型类型(目前仅支持
SPATIAL_RECON_MODEL_TYPE_GS),返回设备适配状态。HMS_SpatialRecon_CreateSession:创建会话,绑定工作路径。开发者必须确保该路径在整个建模期间可读写。
HMS_SpatialRecon_DestroySession:关键资源回收。销毁会话并释放所有内存/GPU 资源。调用后句柄失效,未保存的数据将丢失。
4.3.2 帧数据采集
HMS_SpatialRecon_PushFrame:推送普通
DataFrame。如果在建模已启动(StartSession之后)调用,将返回错误。HMS_SpatialRecon_PushARFrame:推送 AR 会话帧。该接口允许重建系统利用实时的 SLAM 跟踪信息来提升空间对齐精度。
4.3.3 任务执行与精细控制
HMS_SpatialRecon_StartSession:异步启动。支持传入
writeInfo实现在建模后自动开始保存流程。HMS_SpatialRecon_PauseSession / ResumeSession:支持任务动态挂起。如果当前无活动会话,
Pause将返回错误。HMS_SpatialRecon_SetRunningMode:必须在
StartSession之后、重建完成之前调用。
4.3.4 进度与结果检索
HMS_SpatialRecon_GetProgress:
参数:
progress(0.0f-1.0f 浮点指针),stage(阶段枚举指针)。说明:当处于保存阶段时,进度值仅反映文件写入进度。
HMS_SpatialRecon_GetRefinedFrame:获取第
iFrame帧经算法优化后的内外参。注意,此接口不返回imageData。HMS_SpatialRecon_SaveResultToFile:全量建模成功后调用,触发异步导出。
五、 企业级实战:构建“MirrorSpace”空间捕捉系统
我们将基于 Spatial Recon Kit 实现一个完整的 Demo。其核心逻辑分为三层:ArkTS UI 层(交互与展示)、Native Bridge 层(数据分发)以及 Native SDK 层(核心建模)。
5.1 业务场景定义
“MirrorSpace”旨在为电商或房产行业提供快速建模工具。用户手持手机环绕物体一周,即可在本地生成一个可旋转、可导出的 3D 模型。
5.2 Native 层核心实现:ReconstructionPipeline
首先,我们需要在 C++ 层封装一套会话管理逻辑。
5.3 ArkTS 层:构建沉浸式捕捉 UI
5.4 功能设计与架构实现
在企业级应用中,3D 重建并非简单的“拍个照”,而是一个严密的异步状态转换过程。我们的“MirrorSpace”系统采用了典型的 分层解耦架构,确保了在高性能计算下的 UI 响应性。
5.4.1 系统模块划分
捕捉层 (Capture Layer):依托 AR Engine 的
WORLD模式。核心职责是维持 SLAM 追踪的稳定性,并以受控频率(Keyframe Selection)向 NDK 推送数据。计算层 (Native Recon Engine):基于 Spatial Recon Kit NDK。它包含一个工作线程池,负责特征提取、高斯球拟合及内存管理。它通过异步回调向 UI 层报告建模终点。
调度层 (Lifecycle Manager):负责监听系统的 Ability 生命周期,动态调用
SetRunningMode切换功耗模式,并管理工作路径(workPath)的清理。
5.4.2 状态转换机 (State Machine)
重建过程遵循以下严谨的状态机逻辑:
Idle:准备阶段,检查
IsSupport并创建 Session。Recording:数据推送阶段,
PushARFrame持续向缓冲区注入数据。Building:后台训练阶段,UI 锁定交互并显示环形进度条。
Finished:模型就绪,内存中生成可预览的高斯点云。
Exporting:序列化阶段,异步写入
.ply文件。
5.5 运行效果与日志
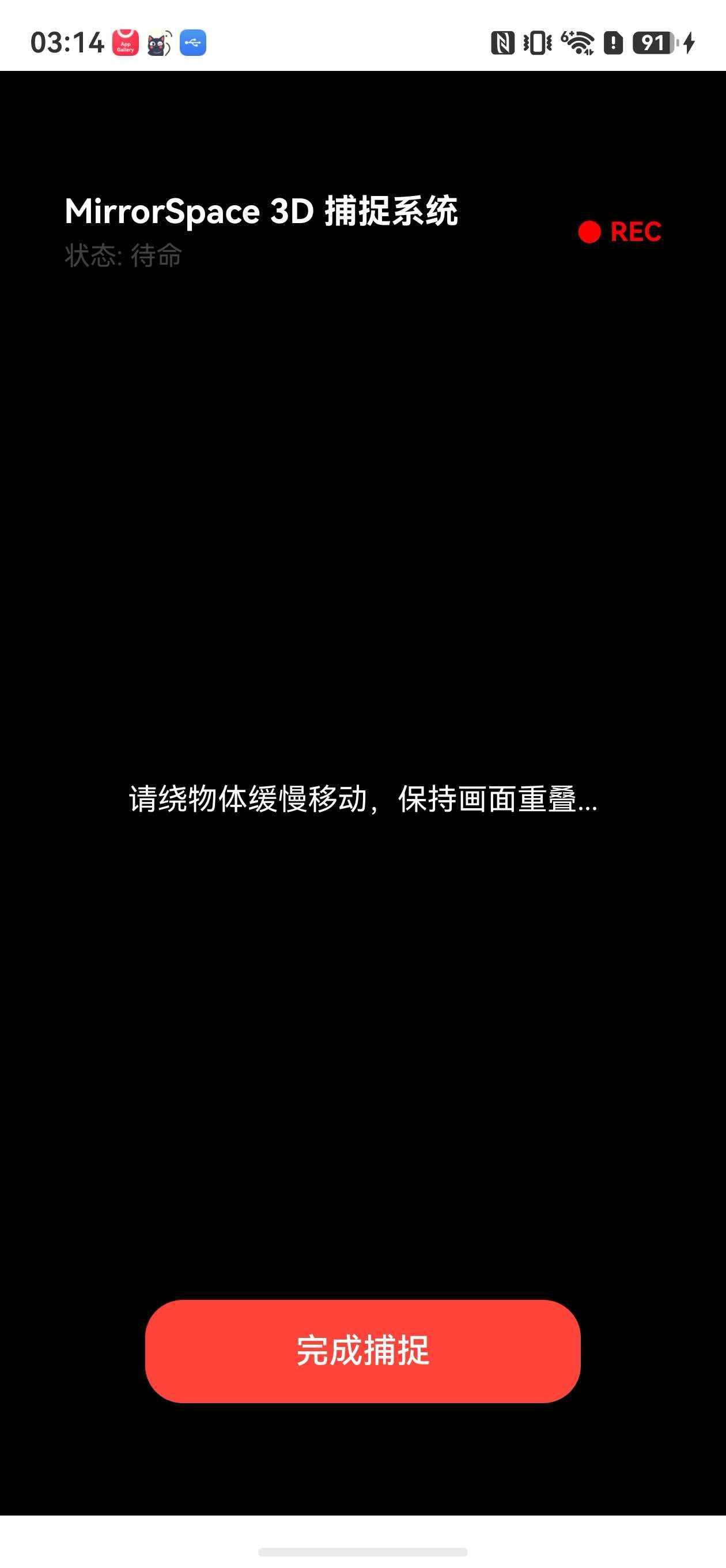
5.5.1 实时捕捉界面效果
系统通过 ARView 渲染真实的物理环境,并在屏幕中心提示用户移动轨迹。
5.5.2 重建进度与高斯拟合过程
随着 HMS_SpatialRecon_GetProgress 数据的返回,UI 会实时更新环形进度条。当进度达到 100% 时,屏幕中央会显示“建模成功”。
5.5.3 模型导出结果验证
导出的 PLY 文件可在标准的 3D 查看器中打开,验证其细节还原度及物理尺度。
5.5.4 关键日志
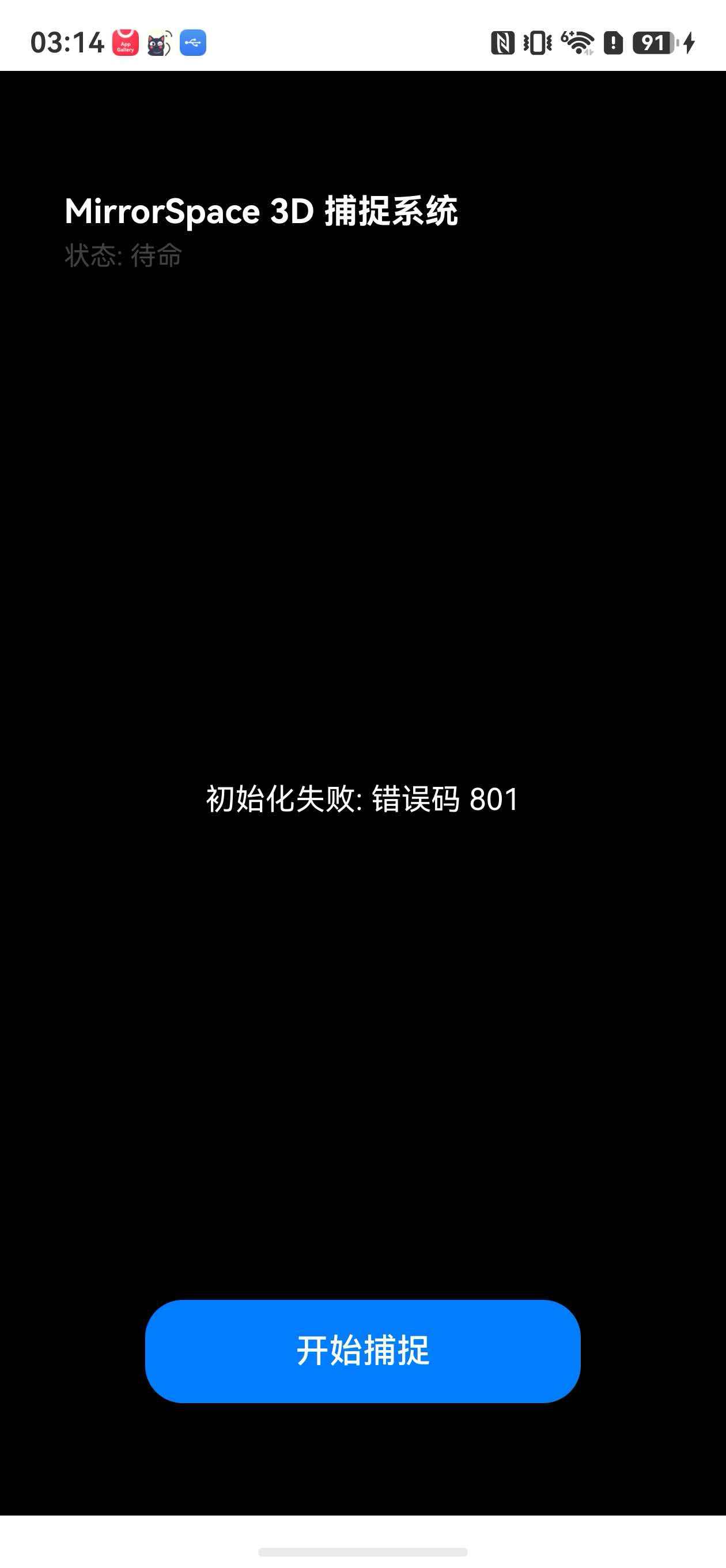
通过 IDE 控制台获取的底层 NDK 日志,是调试应用的关键。
由于手边只有 Mate 60 Pro,设备不支持,无法看到正常效果:
正常 3DGS 模块运行效果如下:

六、 优化策略:避坑与性能调优
在实际开发空间重建应用时,单纯调用接口是不够的,还需要关注以下几个核心维度。
6.1 采集质量控制
3DGS 建模的质量高度依赖输入数据的多样性。
轨迹建议:引导用户进行“半球面”轨迹采集,即围着物体绕一圈(低位),再绕一圈(高位)。
重叠度:相邻帧的图像重叠度应保持在 60% 以上。
光照稳定性:避免在强直射光或极暗环境下建模,否则高斯球会出现严重的“漂浮物”噪声。
6.2 内存与功耗平衡
3DGS 的训练是一个密集型计算过程。
前后台切换:务必监听
Ability的onBackground生命周期,并在此时调用HMS_SpatialRecon_SetRunningMode切换至BACKGROUND模式,避免应用被系统强杀。数据清洗:
HMS_SpatialReconStatus返回SPATIAL_RECON_STATUS_EXCEEDS_MAXIMUM时,应停止数据推送。目前 6.1 版本的推荐最大采集帧数通常在 500 帧以内。
6.3 坐标系对齐 (The AR Sync)
这是 MirrorSpace Demo 能被称为“企业级”的核心原因。通过 HMS_SpatialRecon_PushARFrame 推送的数据,其生成的 3D 模型具有真实的物理尺度(1:1)。这意味着你可以直接在 PLY 模型中测量物体的实际长宽高,这在电商尺寸预览场景中具有极高的商业价值。
七、 总结与展望
HarmonyOS 6.1 的 Spatial Recon Kit 标志着空间计算能力的全面平民化。从前的 3D 重建需要高性能工作站和复杂的后端集群,而现在,通过 Native 层 breathe 异步流水线和 3DGS 算法,我们在移动端仅需几分钟即可复刻现实。
版权声明: 本文为 InfoQ 作者【轻口味】的原创文章。
原文链接:【http://www.infoq.cn/zones/harmonyos/article/fbbd3572937f6cdf01a14844c】。文章转载请联系作者。

🏆2021年InfoQ写作平台-签约作者 🏆 2017-10-17 加入
Android、音视频、AI相关领域从业者。 欢迎加我微信wodekouwei拉您进InfoQ音视频沟通群 邮箱:qingkouwei@gmail.com






评论